
跟踪任务与检测任务有着密切的关系。从输入输出的形式上来看,这两个任务是极为相似的。它们均以图片(或者视频帧)作为模型的输入,经过处理后,输出一堆目标物置的矩形框。它们之间比较大的区别体现在对“目标物体”的定义上。对于检测任务来说,目标物体属于预先定义好的某几个类别,如图1左图所示;而对于跟踪任务来说...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
无人机及其相关技术的不断发展,已经打破了传统的仓储管理方式,为仓储带来了智能化的革新。传统的仓储管理,需要人工进行地毯式巡检,这种方式效率低,费时费力。另外,对于仓储安全的监管不能做到时效性,反应速度也具有滞后性。而全新的无人机巡检模式,基于先进的图像传感器、远程控制技术、AI等,使得无人机能够实现高效安全的自主巡逻,无需过多的人工介入。一旦无人机检测识别到危险,就能够立即发出警报,甚至可能提前预警,滞后性将得到改善。RK3588系列的AI视频跟踪板。青海目标跟踪好选择
目标跟踪
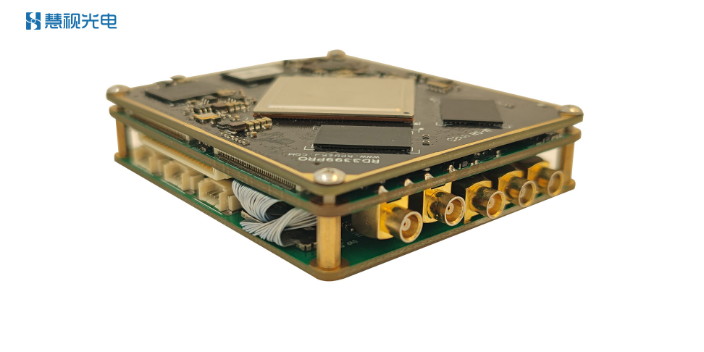
RK3588作为瑞芯微国产化旗舰级芯片,用在目标跟踪领域,通常情况下跟踪帧率都在50Hz左右,这已经足够满足大多数应用领域的需求。但在许多特殊领域,如军备、边防,高帧频的视频输出能够在极短的时间内捕捉到更多的画面,实现高速动态场景的连续拍摄。高帧频的目标跟踪则能够获得更多的目标细节,便于做出下一步判断。许多中低端性能的由于算力等因素无法达到这样的需求,但RK3588作为性能怪,6.0TOPS的算力开发潜力无限。成都慧视就针对于这样的需求场景,在硬件的支持下,定制开发出能够支撑100Hz跟踪算法,从而打造出能够稳定实现100Hz目标跟踪的整合方案。湖北附近目标跟踪提供中心距离(目标到图像中心的像素距离)优先、置信度(目标得分)优先等不同的自动锁定策略。

无人机的迅猛发展,使得无人机的反制技术也水涨船高,常见的有电子干扰、无人机识别对抗等方式。后者采用图像识别技术,通过在无人机摄像头的基础上加装AI高性能图像处理板,在算法的作用下,就具备无人机识别的功能,为无人机对抗创造条件。由于无人机飞行速度极快,因此针对于这样环境下的AI识别需要“与众不同”的图像处理板。我们都知道,当视频帧率越高时,视频越能够体现画面细节信息,而图像识别算法正是逐帧进行识别,因此,摄像头捕捉到的画面细节越多,识别的精度就会越高。
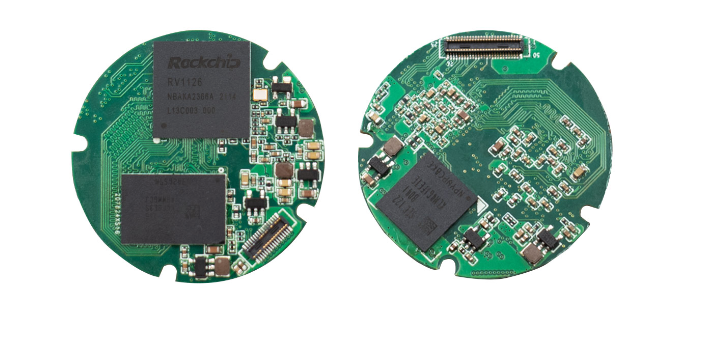
无人机夜间工作时需要依靠红外机芯进行高清成像,而想要具备AI检测识别的能力则可以通过植入图像处理板。成都慧视可以根据需求提供整套的建设方案,实现快速集成开发。慧视Viztra-LE026图像处理板+MiNO 17红外机芯的组合方案,两款产品均使用小巧设计,整体组合重量在30g左右,并且都采用小功耗设计,用在无人机领域不会过多增加负担。在算法的赋能下,能够实现稳定的目标检测识别。Viztra-LE026图像处理板重量在10g左右,采用了瑞芯微全国产化芯片RV1126,能够输出2.0TOPS的算力,功耗不高于4W。能够以30Hz帧率跟踪像素2*2的目标,能够识别像素为12*12的目标,且识别率高于85%。而MiNO 17红外机芯重量在20g左右(净重5g(不含镜头)),像素分辨率为640*512,采用9/13/25mm三种定焦设计,支持18中伪彩选择,功耗小于0.75W。模拟接口转网络输出的视频跟踪板。

多目标跟踪是指在连续的图像中,通过目标检测算法识别出每一帧中的目标,并在时间上跟踪它们的位置和状态。但目标会不断发生尺度、形变、遮挡等变化,而且还会有目标出现和消失的情况,再加上视频采集端的相机所处环境可能受到外界影响导致抖动的情况(例如无人机高空检测),就会给多目标跟踪造成一定的困难。由于我们不能控制目标,所以只能从视频采集端维护跟踪的稳定性。因此,成都慧视针对于多目标检测跟踪抖动丢失的优化方法是:1.改进目标检测,使用更加鲁棒的目标检测算法。2.增强特征描述,利用深度学习提取更高级别的语义特征,这些特征对于小范围内的视角变化具有更好的不变性3.改进运动模型,在算法中加入对摄像头运动的估计,通过补偿摄像头运动来减小目标真实运动与预测之间的差距。4.数据关联策略,设计更灵活的数据关联算法,允许更大的距离阈值来匹配候选目标。空对地目标跟踪模块。青海目标跟踪进货价
SDI接口转网络输出的视频跟踪板。青海目标跟踪好选择
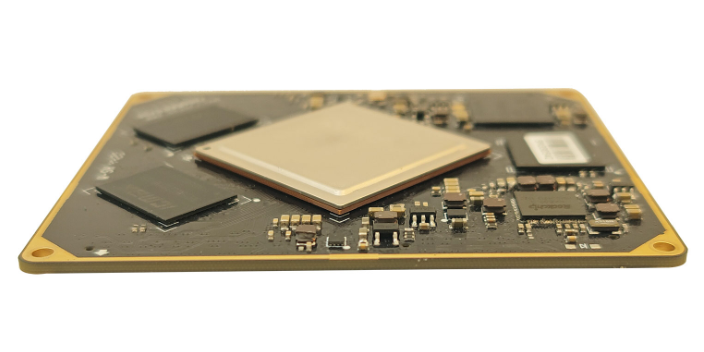
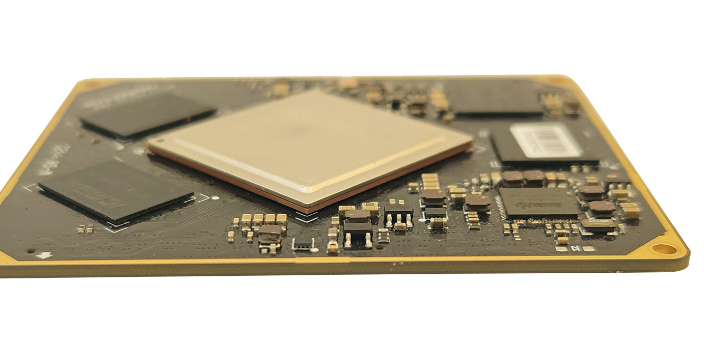
在许多领域,无人机的作业环境相对复杂,需要识别处理图像背景目标众多,这种环境下,要想实现更高精度的检测识别效果,图像处理板的性能至关重要。在慧视光电开发的多款图像处理板中,Viztra-HE030图像处理板以6.0TOPS得以胜任。这款板卡采用了瑞芯微旗舰级芯片RK3588,8nmLP制程,搭载八核64位CPU,主频高达2.4GHz。集成ARMMali-G610MP4四核GPU,内置AI加速器NPU,支持主流的深度学习框架。性能强劲的RK3588可为无人机AI识别的应用场景带来更强大的性能表现。青海目标跟踪好选择
与目标跟踪相关的文章

广西高效目标跟踪
- 云南工业目标跟踪 2026-02-24
- 重庆哪里有目标跟踪 2026-02-24
- 比较好的目标跟踪哪里好 2026-02-24
- 江西专业目标跟踪 2026-02-24
- 省时省力目标跟踪性价比 2026-02-24
- 信息化目标跟踪诚信推荐 2026-02-24
- 信息化目标跟踪推荐厂家 2026-02-24
- 青海目标跟踪好选择 2026-02-24
- 辽宁哪里有目标跟踪 2026-02-24
- 广东人防目标跟踪 2026-02-24
- 耐用目标跟踪联系方式 2026-02-24
- 流畅目标跟踪厂家电话 2026-02-24
与目标跟踪相关的产品

与目标跟踪相关的新闻
-
重庆比较好的目标跟踪 2026-02-24 22:02:22这样的无人机智慧“眼”可以通过搭载吊舱实现,吊舱内置各种规格的摄像机,能够实现多角度观察。而智能化则可以在吊舱的基础上植入高性能AI图像处理板。图像处理板能够对摄像机获取的图像进行AI智能分析,这样无人机就能够自动识别缺陷,然后进行信息留存、回传。在这个领域,成都慧视光电可以根据需求进行多接口图像处...
-
海南质量目标跟踪 2026-02-14 08:01:36识别算法的性能提升依靠大量的图像标注,传统模式下,需要人工对同一识别目标的数据集进行一步一步手动拉框,但是这个过程的痛苦只有做过的人才知道。越多素材的数据集对于算法的提升越有帮助,常规情况下,一个20秒时长30帧的视频就多达两三百张画面需要标注,如果视频时长或者视频的帧速率增加,需要标注的帧画面将会...
-
可靠目标跟踪推荐厂家 2026-02-14 13:01:39识别算法的性能提升依靠大量的图像标注,传统模式下,需要人工对同一识别目标的数据集进行一步一步手动拉框,但是这个过程的痛苦只有做过的人才知道。越多素材的数据集对于算法的提升越有帮助,常规情况下,一个20秒时长30帧的视频就多达两三百张画面需要标注,如果视频时长或者视频的帧速率增加,需要标注的帧画面将会...
-
陕西安全目标跟踪 2026-02-14 09:01:45识别算法的性能提升依靠大量的图像标注,传统模式下,需要人工对同一识别目标的数据集进行一步一步手动拉框,但是这个过程的痛苦只有做过的人才知道。越多素材的数据集对于算法的提升越有帮助,常规情况下,一个20秒时长30帧的视频就多达两三百张画面需要标注,如果视频时长或者视频的帧速率增加,需要标注的帧画面将会...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

信息化目标跟踪推荐厂家
2026-02-24 -

青海目标跟踪好选择
2026-02-24 -

辽宁哪里有目标跟踪
2026-02-24 -
高性能目标识别售价
2026-02-24 -
网络目标识别编号
2026-02-24 -
四川快速目标识别系统
2026-02-24 -

广东人防目标跟踪
2026-02-24 -

耐用目标跟踪联系方式
2026-02-24 -
***时省力目标识别系统
2026-02-24