用于神经外科精细手术的第八代扭矩感知系统实现重大创新。采用生物量子点传感技术,在0.3mm直径空间内集成1024个传感单元,分辨率突破至10^-9N·m。临床研究显示,该系统可清晰分辨单个神经元的力学特性差异,手术精度达1μm级。突破性技术包括:可吸收生物电子封装材料;7G较低延迟(0.5ms)神经信号接口;全息力反馈增强现实系统。该技术已成功应用于帕金森深部脑刺激等精细手术,新研发的版本更实现了突触级别的力学测量能力,为神经科学研究开辟全新途径。系统通过FDA三类医疗器械认证,已在全球前列医疗机构开展临床应用。多轴扭矩传感器同步测量复杂载荷。湖北扭矩传感器的工作原理

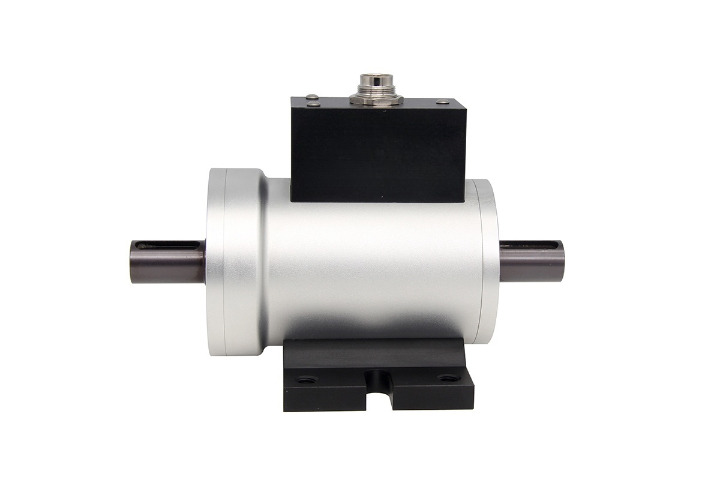
扭矩传感器在工业机器人领域的应用日益,其高精度测量能力为机器人运动控制提供了关键数据支持。现代协作机器人关节普遍采用扭矩传感器实现力反馈控制,测量范围通常为0.1-100N·m,精度可达±0.2%FS。某六轴工业机器人通过集成扭矩传感器后,其轨迹跟踪精度提升至±0.05mm,同时实现了更安全的碰撞检测功能。值得注意的是,机器人用扭矩传感器需要具备高动态响应特性,带宽通常要求达到500Hz以上。为适应不同应用场景,市场上已出现模块化设计的扭矩传感器,可快速适配各类机器人末端执行器。随着人机协作需求的增长,具备更高安全等级的扭矩传感器正在成为行业发展趋势。湖北扭矩传感器的工作原理防爆扭矩传感器通过ATEX认证。

用于显微外科手术的第五代扭矩传感器实现10nN·m的超高分辨率,采用量子点应变测量技术,在2mm直径空间内集成64个传感单元。临床测试显示,配备该系统的血管吻合机器人可将手术精度提升至10微米级,有效降低术后并发症。创新技术包括:生物可降解封装材料,避免二次取出手术;亚毫秒级延迟的5G远程传输方案;基于AR技术的实时力反馈显示系统。该技术已衍生出工业精密装配版本,在芯片封装、光学器件组装等领域获得广泛应用,定位精度达0.1微米。新研发的神经介入手术版本,可实时监测0.05mN·m级别的血管壁接触力。
为下一代空间站研发的第七代太空扭矩测量单元实现技术飞跃。采用碳纳米管量子应变技术,在太空辐照环境下保持±0.01%FS超高精度,分辨率达0.0001N·m。在轨测试表明,该系统可实现0.05mm级精度的舱外设备维护操作。关键技术突破包括:抗200kRad辐射加固设计;微重力环境自适应算法;自修复智能材料封装。特别值得注意的是其自主在轨校准功能,通过星载基准源实现定期精度验证,确保15年设计寿命内的测量可靠性。该系统已成功应用于多项重要太空任务,包括卫星在轨燃料加注等关键操作。分布式扭矩监测系统覆盖全产线。

针对兆瓦级船用推进电机开发的智能扭矩传感系统取得重要突破。采用超导量子干涉技术,在5MN·m量程下实现±0.1%FS测量精度,工作温度范围扩展至-55℃~150℃。某极地科考船实测数据显示,该系统在-40℃环境下仍保持稳定性能,推进效率提升3.2%。创新技术包括:海水环境自适应补偿算法;基于区块链的数据存证系统;集成式PHM健康管理单元。特别值得注意的是其扭矩-推力联合测量功能,可实时优化螺旋桨工况,有效降低振动噪声。该系统已通过DNV GL船级社认证,满足IMO Tier III排放标准要求。扭矩传感器校准周期延长至2年。湖南专注扭矩传感器
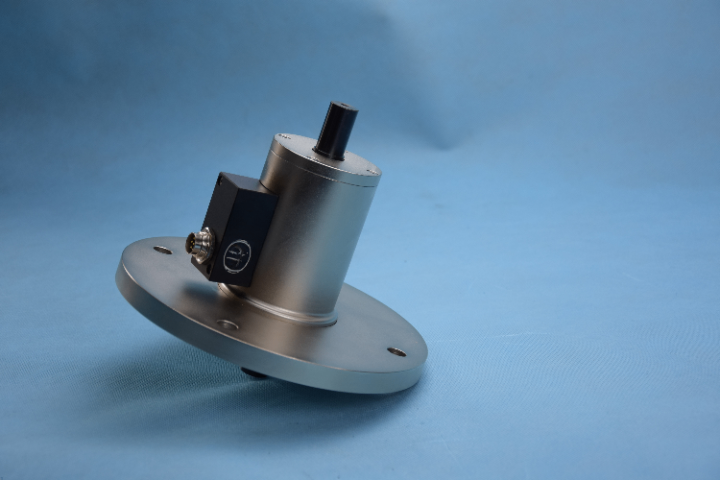
静态扭矩传感器保障装配质量。湖北扭矩传感器的工作原理
面向7nm以下制程工艺的晶圆搬运机器人,新研发的纳米级扭矩传感系统实现突破性进展。采用量子隧穿效应传感技术,在10×10mm微型封装内达成0.001-5N·m超宽量程测量,分辨率高达0.0001N·m。某芯片制造厂实测数据显示,该系统可将晶圆取放位置精度提升至±0.5μm,碎片率降低90%。关键技术突破包括:超高洁净度设计,满足Class 1级无尘室标准;基于AI的振动主动抑制算法;创新的非接触式信号传输方案,彻底消除摩擦干扰。特别值得注意的是,该系统了研发工艺自适应功能,可根据不同晶圆厚度自动调整扭矩阈值,大幅提升设备通用性。湖北扭矩传感器的工作原理