自动化智能机器人实验台的操作难易程度因多种因素而异,以下是具体分析:从实验台本身设计角度来看直观简洁的设计:一些自动化智能机器人实验台为了方便用户操作,在设计上会尽可能地追求直观和简洁。比如,采用图形化的操作界面,通过简单易懂的图标和菜单,让用户可以轻松找到各种功能入口。像某些实验台的操作界...
自动化智能机器人实验台基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP500
- 类型
- 自动化实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
自动化智能机器人实验台企业商机
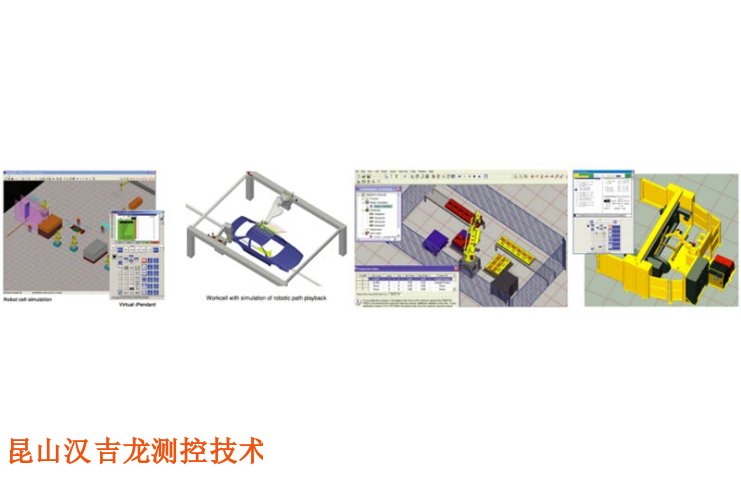
轨迹规划与优化方面模型预测操控算法(MPC):通过建立机器人的运动模型,预测机器人在未来一段时间内的运动轨迹,然后在每个操控周期内,基于预测结果和当前状态,优化计算出**优的操控输入序列,使机器人沿着**接近理想的轨迹运动,从而提高轨迹精度,减少运动偏差。基于样条曲线的轨迹规划算法:如采用B样条曲线等方法进行轨迹规划,可生成平滑、连续的运动轨迹,避免轨迹中的不连续点或突变,减少机器人在运动过程中的冲击和振动,保证机器人能够精确地按照预设轨迹运动,提高操作的平稳性和精度。增强系统鲁棒性方面滑模操控算法:在系统状态空间中定义一个滑动面,使系统在受到外部干扰或模型不确定性影响时,能迅速调整到滑动面上并保持在滑动面上运动,对系统的参数变化和外部干扰具有很强的鲁棒性,确保机器人在复杂的实验环境或存在干扰的情况下,仍能保持较高的操作精度。鲁棒操控算法:设计时充分考虑了系统模型的不确定性和可能存在的外部干扰,通过优化操控参数和结构,使系统在各种不确定因素下都能保持稳定的性能,保证机器人的运动精度不受影响,提高实验台在不同工况下的可靠性和准确性。 实验台能承载机器人梦想吗?自动化自动化智能机器人实验台课程

配合方式通信协议:实验台与软件之间通过特定的通信协议进行数据传输和指令交互,如TCP/IP协议、串口通信协议等。例如,通过串口通信协议,实验台可以将传感器数据发送给数据分析软件,同时接收来自编程软件的指令。应用程序接口(API):实验台通常会提供相应的API,方便软件开发者将实验台与各种软件进行集成。开发者可以调用这些API来实现对实验台的和数据采集,如通过ROS的API可以方便地实现不同软件模块与实验台的交互。中间件:一些情况下会使用中间件来实现实验台与不同软件的连接和协同工作。中间件可以对不同软件和实验台之间的通信和数据格式进行转换和适配,使它们能够更好地配合,如在工业自动化领域,OPCUA中间件常被用于连接机器人实验台与各种工业软件。高校自动化智能机器人实验台操作步骤智能机器人因实验台能突破吗?
自动化智能机器人实验台与软件配合时可能会遇到兼容性、通信、数据处理等多方面的问题,以下是具体分析:兼容性问题系统兼容性:实验台的硬件驱动程序可能只支持特定版本的操作系统,而所使用的软件可能需要在其他系统环境下运行,就会出现不兼容的情况。例如,实验台的底层驱动基于Windows10开发,而某些软件*支持Windows11及以上版本。软件版本兼容性:不同软件版本之间可能存在兼容性问题。例如,机器人控制软件更新后,与之前版本的数据分析软件在数据接口或数据格式上发生变化,导致无法正常交互数据。硬件与软件兼容性:新的软件功能可能需要硬件具备更高的性能或特定的功能支持,若实验台硬件无法满足,就会出现问题。如软件更新后需要实验台的处理器具备更高的运算速度来处理复杂的图像识别任务,而现有硬件难以达到要求。
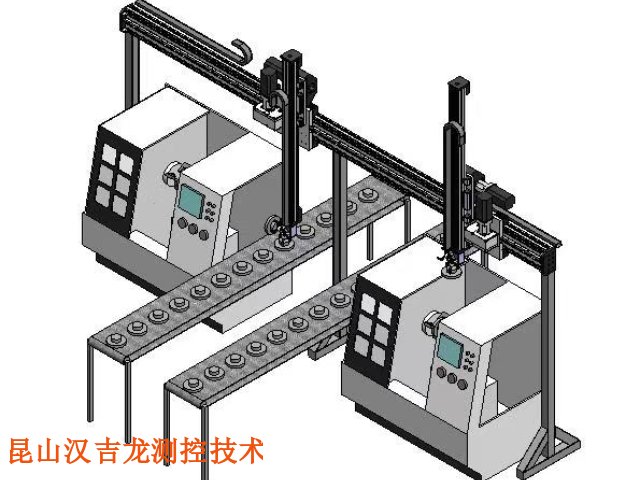
常见类型工业机器人实验台:主要模拟工业生产中的机器人应用场景,如焊接、装配、搬运等,通常具有较高的负载能力和精度,可用于研究工业机器人的控制策略和优化生产流程。服务机器人实验台:侧重于机器人在服务领域的应用,如家庭服务、酒店服务、导览服务等,注重人机交互、环境感知和自主导航等功能的研究和开发。医疗机器人实验台:针对医疗领域的需求设计,用于研究和开发手术机器人、康复机器人、护理机器人等,需要具备高精度的操作和与人体的安全交互功能。智能移动机器人实验台:以移动机器人为**,研究机器人的自主导航、路径规划、环境感知等技术,可应用于物流运输、安防监控、农业植保等领域。自动化智能机器人实验台的数据处理速度很快。
自动化智能机器人实验台智能感知与决策多种传感器融合:集成了多种类型的传感器,如视觉传感器、激光雷达、超声波传感器等,通过传感器融合技术,使机器人能够更***、准确地感知周围环境,为智能决策提供丰富的数据支持。智能算法应用:支持各种智能算法,如深度学习、强化学习等,使机器人能够根据感知到的环境信息进行自主学习和决策,实现更复杂的任务和行为,如自主避障、路径规划等。可扩展性硬件扩展:具备良好的硬件扩展性,预留了多个接口和插槽,方便研究人员根据实验需求灵活添加或更换硬件模块,如增加新的传感器、扩展电机驱动能力等,以满足不同实验场景和任务的要求。软件升级:软件系统具有开放性和可升级性,研究人员可以方便地对程序、算法模型等进行更新和优化,不断提升机器人的性能和功能,适应不断发展的机器人技术需求。安全可靠性安全防护机制:设计了完善的安全防护措施,如紧急停止按钮、安全围栏、碰撞检测传感器等,能够在机器人出现异常情况或可能发生危险时及时停止运行,保护实验人员和设备的安全。稳定性设计:在硬件选型和系统设计上充分考虑了稳定性因素,采用***的元器件和可靠的电路设计,经过严格的测试和验证。智能机器人实验台有独具匠心吗?高校自动化智能机器人实验台操作步骤
新型自动化智能机器人实验台有哪些新优势呢?自动化自动化智能机器人实验台课程
瓦伦尼安教学设备有限公司自动化智能机器人实验台传感器相关实验传感器性能测试实验:对机器人搭载的各类传感器,如摄像头、激光雷达、力传感器等进行性能测试,包括测量传感器的精度、分辨率、响应时间、测量范围等指标,评估传感器是否满足机器人的应用需求。传感器融合实验:将多种传感器的数据进行融合处理,如将视觉传感器和激光雷达的数据融合,利用不同传感器的优势,提高机器人对环境的感知能力和信息获取的准确性,用于机器人的自主导航系统、目标识别等任务。环境感知实验:利用传感器让机器人感知周围环境的信息,如障碍物检测、地形识别、目标物体等,研究机器人在不同环境下的感知策略和算法,使机器人能够适应复杂多变的环境。 自动化自动化智能机器人实验台课程
与自动化智能机器人实验台相关的文章
6轴自动化智能机器人实验台怎么用
- 自动化自动化智能机器人实验台课程 2025-03-01
- 新一代自动化智能机器人实验台课程 2025-03-01
- 重载自动化智能机器人实验台操作步骤 2025-03-01
- 维修自动化智能机器人实验台视频 2025-03-01
- 昆山自动化智能机器人实验台工作原理 2025-02-28
- 维护自动化智能机器人实验台公司 2025-02-28
- 新一代自动化智能机器人实验台批发 2025-02-28
- VT-SJC1000自动化智能机器人实验台图片 2025-02-27
- 汉吉龙自动化智能机器人实验台用途 2025-02-27
- 气动系统自动化智能机器人实验台电话 2025-02-27
- 自动化装置自动化智能机器人实验台制造商 2025-02-27
- 实物自动化智能机器人实验台电话 2025-02-27
与自动化智能机器人实验台相关的产品


与自动化智能机器人实验台相关的新闻
-
维修自动化智能机器人实验台特点 2025-02-24 23:05:20瓦伦尼安教学设备有限公司自动化智能机器人实验台传感器相关实验传感器性能测试实验:对机器人搭载的各类传感器,如摄像头、激光雷达、力传感器等进行性能测试,包括测量传感器的精度、分辨率、响应时间、测量范围等指标,评估传感器是否满足机器人的应用需求。传感器融合实验:将多种传感器的数据进行融合处理...
-
原装进口自动化智能机器人实验台图片 2025-02-24 16:06:12汉吉龙测控有限公司自动化智能机器人实验台在教学领域具有多方面的应用,涵盖了从基础教学到技能培养以及创新实践等多个层面,以下是具体介绍:基础课程教学机械原理与设计:通过让学生观察智能机器人实验台的机械结构,如关节连接方式、传动装置等,帮助学生理解机械原理中的杠杆、齿轮传动、连杆机构等知识。...
-
智能制造自动化智能机器人实验台操作步骤 2025-02-24 05:06:30数据处理问题数据格式不一致:实验台输出的数据格式与软件要求的数据格式不同,软件无法正确解析数据。例如,实验台输出的传感器数据是二进制格式,而数据分析软件需要的是CSV格式,需要进行数据格式转换。数据丢失或错误:在数据采集、传输或处理过程中,可能会出现数据丢失或错误的情况。比如传感器故障可...
-
6轴自动化智能机器人实验台厂家 2025-02-23 17:06:14合作与资源共享产学研合作:与高校、科研机构合作,利用其科研资源和人才优势,共同开展研发工作。高校和科研机构可能拥有实验设备和技术,通过合作可以降低企业的研发成本。行业内合作:与同行企业或相关企业合作,共享技术、资源和经验。例如,多家企业可以共同建设一个公共的机器人实验平台,实现资源共享。...
与自动化智能机器人实验台相关的问题
新闻资讯
产品推荐
-

贵州激光对中仪
2026-05-17 -

工业联轴器对中仪怎么样
2026-05-17 -

联轴器对中服务工作原理
2026-05-17 -

河北多功能激光对中仪
2026-05-17 -

10米联轴器对中仪保修
2026-05-17 -

傻瓜式联轴器对中仪保养
2026-05-17 -

租用振动激光对中仪写论文
2026-05-17 -
镭射联轴器对中仪使用
2026-05-17 -

教学联轴器对中仪连接
2026-05-17