自动化智能机器人实验台的操作难易程度因多种因素而异,以下是具体分析:从实验台本身设计角度来看直观简洁的设计:一些自动化智能机器人实验台为了方便用户操作,在设计上会尽可能地追求直观和简洁。比如,采用图形化的操作界面,通过简单易懂的图标和菜单,让用户可以轻松找到各种功能入口。像某些实验台的操作界...
自动化智能机器人实验台基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP500
- 类型
- 自动化实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
自动化智能机器人实验台企业商机
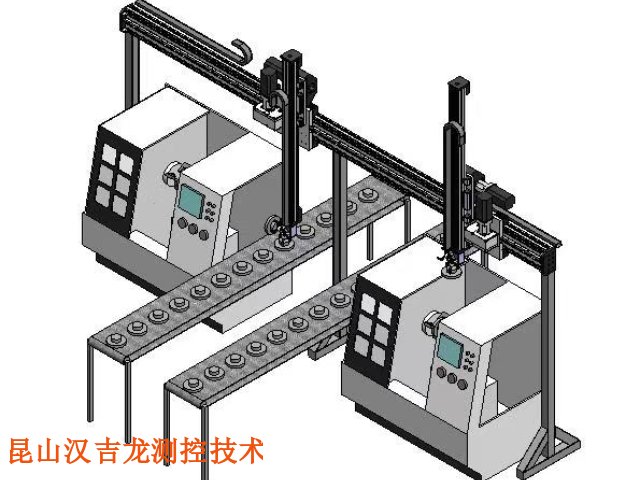
配合方式通信协议:实验台与软件之间通过特定的通信协议进行数据传输和指令交互,如TCP/IP协议、串口通信协议等。例如,通过串口通信协议,实验台可以将传感器数据发送给数据分析软件,同时接收来自编程软件的指令。应用程序接口(API):实验台通常会提供相应的API,方便软件开发者将实验台与各种软件进行集成。开发者可以调用这些API来实现对实验台的和数据采集,如通过ROS的API可以方便地实现不同软件模块与实验台的交互。中间件:一些情况下会使用中间件来实现实验台与不同软件的连接和协同工作。中间件可以对不同软件和实验台之间的通信和数据格式进行转换和适配,使它们能够更好地配合,如在工业自动化领域,OPCUA中间件常被用于连接机器人实验台与各种工业软件。自动化智能机器人实验台的操作界面简洁易懂。送料设备自动化智能机器人实验台系统

自动化智能机器人实验台数据挖掘与预测算法关联规则挖掘算法:如Apriori算法,用于发现数据集中不同变量之间的关联关系。在机器人实验数据中,可挖掘出机器人的某些操作行为与特定环境因素或其他系统状态之间的关联,例如发现当环境温度较高时,机器人的某个部件更容易出现故障,为故障维护提供依据。时间序列预测算法:包括ARIMA模型、LSTM神经网络等。ARIMA模型基于时间序列的自相关性和差分特性进行预测,可用于预测机器人的某些性能指标随时间的变化趋势,如预测机器人的电池电量消耗趋势。LSTM神经网络则能更好地处理长期序列中的依赖关系,在机器人的运动预测、故障预测等方面有广泛应用,如预测机器人在未来几个时间步的运动状态。 送料设备自动化智能机器人实验台系统如何利用实验台提高学生对机器人视觉识别技术的应用能力?

功能与性能问题功能不匹配:软件的功能与实验台的实际需求不匹配,无法充分发挥实验台的性能。例如,软件没有提供实验台所需的特定运动操控功能,或者软件的操控逻辑与实验台的硬件结构不匹配,导致机器人无法完成预期任务。性能瓶颈:软件的算法复杂度较高,而实验台的硬件性能有限,会导致软件运行缓慢,影响机器人的实时操控和响应速度。比如在进行复杂的路径规划算法计算时,实验台的处理器性能不足,使得机器人的路径规划时间过长,无法满足实时应用的要求。实时性要求***:有些软件需要实时获取实验台的数据并进行处理,而实验台可能无法满足如此高的实时性要求。例如,在机器人的高速运动操控中,软件需要以极高的频率获取传感器数据来调整运动姿态,但实验台的数据采集和传输速度有限,无法满足软件的实时性需求,导致机器人运动操控精度下降。
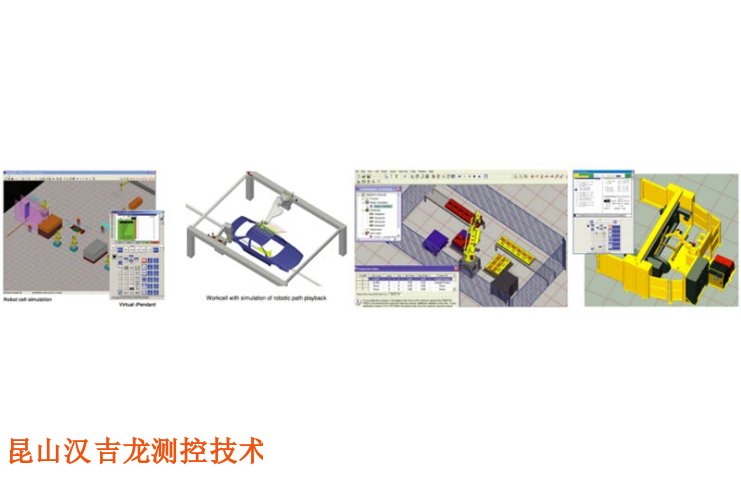
VALENIAN自动化智能机器人实验台技术研发:研究人员可以在实验台上对机器人的运动算法、路径规划算法、传感器融合算法、人工智能算法等进行开发和调试,不断优化和改进机器人的性能和智能水平。性能测试:通过在实验台上设置各种不同的工况和环境条件,对机器人的运动精度、速度、负载能力、传感器精度、可靠性等性能指标进行测试和评估,确保机器人满足设计要求和实际应用需求。故障诊断与维护:利用实验台的监测和诊断功能,对机器人在运行过程中出现的故障进行诊断,分析故障原因,采取相应的维护措施,提高机器人的稳定性和使用寿命。教学与培训:在教育领域,自动化智能机器人实验台是很好的教学工具,可用于机器人相关的课程教学、实验教学和学生实践项目,帮助学生更好地理解机器人的原理和技术,培养学生的动手能力和创新思维。应用场景模拟:根据不同的应用需求,在实验台上模拟各种实际应用场景,如工业生产中的装配、搬运场景,物流仓库中的货物分拣场景,家庭服务中的清洁、护理场景等,对机器人在特定场景下的应用进行验证和优化。 实验台是机器人技术的引擎吗?
自动化智能机器人实验台智能感知与决策多种传感器融合:集成了多种类型的传感器,如视觉传感器、激光雷达、超声波传感器等,通过传感器融合技术,使机器人能够更***、准确地感知周围环境,为智能决策提供丰富的数据支持。智能算法应用:支持各种智能算法,如深度学习、强化学习等,使机器人能够根据感知到的环境信息进行自主学习和决策,实现更复杂的任务和行为,如自主避障、路径规划等。可扩展性硬件扩展:具备良好的硬件扩展性,预留了多个接口和插槽,方便研究人员根据实验需求灵活添加或更换硬件模块,如增加新的传感器、扩展电机驱动能力等,以满足不同实验场景和任务的要求。软件升级:软件系统具有开放性和可升级性,研究人员可以方便地对程序、算法模型等进行更新和优化,不断提升机器人的性能和功能,适应不断发展的机器人技术需求。安全可靠性安全防护机制:设计了完善的安全防护措施,如紧急停止按钮、安全围栏、碰撞检测传感器等,能够在机器人出现异常情况或可能发生危险时及时停止运行,保护实验人员和设备的安全。稳定性设计:在硬件选型和系统设计上充分考虑了稳定性因素,采用***的元器件和可靠的电路设计,经过严格的测试和验证。自动化为实验台带来机遇了吗?昆山自动化智能机器人实验台电话
实验台助力机器人技术走向成熟。送料设备自动化智能机器人实验台系统
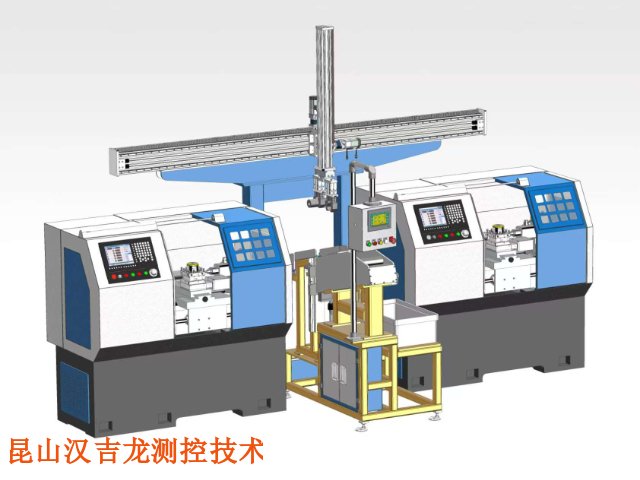
自动化智能机器人实验台是一种用于开展智能机器人相关实验和研究的设备平台,以下是关于它的一些介绍:功能运动操控功能:可实现机器人的移动、关节运动等基本动作操控,通过编程设定机器人的运动轨迹、速度、加速度等参数,如让机械臂按照特定路径抓取和放置物体,或使移动机器人在设定区域内自主导航。感知功能:配备多种传感器,如视觉传感器可进行图像识别和目标检测,让机器人识别物体的形状、颜色、位置等;力觉传感器能感知机器人与物体接触时的力的大小和方向,使机器人在操作物体时能操控力度,避免损坏物品;还有激光雷达、超声波传感器等用于环境感知和避障。数据处理与分析功能:对传感器采集到的数据进行处理和分析,提取有用信息,如通过对视觉图像的分析确定物体的姿态和位置,根据力觉数据调整机器人的操作力度,还能对实验过程中的各种数据进行记录和存储,以便后续分析和研究。通信功能:支持与其他设备或系统进行通信,如与计算机、服务器进行数据传输和交互,接收操控指令和上传实验数据;也可与其他机器人或智能设备进行协同工作,实现多机器人系统的实验研究。编程与调试功能:提供编程接口和开发环境,方便用户使用各种编程语言对机器人进行编程。 送料设备自动化智能机器人实验台系统
与自动化智能机器人实验台相关的文章
6轴自动化智能机器人实验台怎么用
- 自动化自动化智能机器人实验台课程 2025-03-01
- 新一代自动化智能机器人实验台课程 2025-03-01
- 重载自动化智能机器人实验台操作步骤 2025-03-01
- 维修自动化智能机器人实验台视频 2025-03-01
- 昆山自动化智能机器人实验台工作原理 2025-02-28
- 维护自动化智能机器人实验台公司 2025-02-28
- 新一代自动化智能机器人实验台批发 2025-02-28
- VT-SJC1000自动化智能机器人实验台图片 2025-02-27
- 汉吉龙自动化智能机器人实验台用途 2025-02-27
- 气动系统自动化智能机器人实验台电话 2025-02-27
- 自动化装置自动化智能机器人实验台制造商 2025-02-27
- 实物自动化智能机器人实验台电话 2025-02-27
与自动化智能机器人实验台相关的产品

与自动化智能机器人实验台相关的新闻
-
维修自动化智能机器人实验台特点 2025-02-24 23:05:20瓦伦尼安教学设备有限公司自动化智能机器人实验台传感器相关实验传感器性能测试实验:对机器人搭载的各类传感器,如摄像头、激光雷达、力传感器等进行性能测试,包括测量传感器的精度、分辨率、响应时间、测量范围等指标,评估传感器是否满足机器人的应用需求。传感器融合实验:将多种传感器的数据进行融合处理...
-
原装进口自动化智能机器人实验台图片 2025-02-24 16:06:12汉吉龙测控有限公司自动化智能机器人实验台在教学领域具有多方面的应用,涵盖了从基础教学到技能培养以及创新实践等多个层面,以下是具体介绍:基础课程教学机械原理与设计:通过让学生观察智能机器人实验台的机械结构,如关节连接方式、传动装置等,帮助学生理解机械原理中的杠杆、齿轮传动、连杆机构等知识。...
-
智能制造自动化智能机器人实验台操作步骤 2025-02-24 05:06:30数据处理问题数据格式不一致:实验台输出的数据格式与软件要求的数据格式不同,软件无法正确解析数据。例如,实验台输出的传感器数据是二进制格式,而数据分析软件需要的是CSV格式,需要进行数据格式转换。数据丢失或错误:在数据采集、传输或处理过程中,可能会出现数据丢失或错误的情况。比如传感器故障可...
-
6轴自动化智能机器人实验台厂家 2025-02-23 17:06:14合作与资源共享产学研合作:与高校、科研机构合作,利用其科研资源和人才优势,共同开展研发工作。高校和科研机构可能拥有实验设备和技术,通过合作可以降低企业的研发成本。行业内合作:与同行企业或相关企业合作,共享技术、资源和经验。例如,多家企业可以共同建设一个公共的机器人实验平台,实现资源共享。...
与自动化智能机器人实验台相关的问题
新闻资讯
产品推荐
-
瑞典对中仪服务怎么样
2026-05-06 -
专业级轴对中激光仪多少钱
2026-05-06 -

S和M设备安装对心校准仪
2026-05-06 -

傻瓜式对中仪制造商
2026-05-06 -

工厂百分表对中仪使用视频
2026-05-06 -
AS激光联轴器对中仪公司
2026-05-06 -

耦合快速对中校正仪激光
2026-05-06 -

ASHOOTER设备安装对心校准仪使用视频
2026-05-06 -
激光轴对中激光仪定做
2026-05-06