-
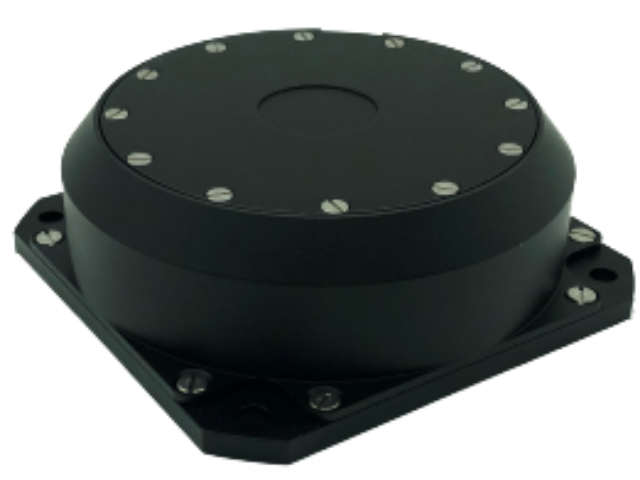
 北京LINS-F3X90光纤陀螺仪惯性测量单元05.19
北京LINS-F3X90光纤陀螺仪惯性测量单元05.19光纤陀螺工作原理本质上利用光学原理来检测角速度。它将光纤绕成一个线圈,并将其固定在一个回转的载体上,当载体旋转时,光纤将绕线圈旋转,从而形成光纤陀螺效应。 光纤陀螺的工作原理是,当载体旋转时,光纤会因...

-
 北京光纤陀螺仪惯性测量单元价格05.19
北京光纤陀螺仪惯性测量单元价格05.19民用方面的应用 在民用领域主要侧重于中低精度光纤陀螺的应用,主要应用有:地面车辆的自动导航、定位定向、车辆控制;对农用飞机姿态控制,进行播种、喷洒农药;在地下工程维护中,寻找损坏的电力线、管道和通信光...
-
 武汉小体积光纤陀螺仪厂家价格05.18
武汉小体积光纤陀螺仪厂家价格05.18在航空航天领域,高精度光纤陀螺仪发挥着举足轻重的作用。由于其高精度、高可靠性和抗干扰能力强的特点,光纤陀螺仪被普遍应用于卫星导航、导弹制导、飞机姿态控制、天线系统稳定等关键任务中。光纤陀螺仪能够提供准...
-
 上海高精度光纤陀螺仪厂家05.18
上海高精度光纤陀螺仪厂家05.18自从1976年美国犹他大学的VALI和SHORTHILL等人成功研制第1个光纤陀螺(fiber-optic gyroscope, FOG)以来,光纤陀螺已经发展了30多年。在30多年的发展过程中,许多...
-
 北京LINS-F98光纤陀螺仪传感器厂家05.18
北京LINS-F98光纤陀螺仪传感器厂家05.18长期以来,特种光纤及惯性导航系统部件属于有名工业重要基础元器件,在迫切的进口替代需求驱动下,重要和相关企业都高度重视惯性导航产业链的研发。国家相关部门出台的一系列法规和政策文件为有名科技工业以及惯性导...
-
LINS-F3X80光纤陀螺仪惯性测量单元价格05.17
传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约。自从上个世纪七十年代以来,现代陀螺仪的发展已经进入了一个全新的阶段。 现代光纤陀螺仪...
-
 武汉LINS354惯性导航模块价格05.17
武汉LINS354惯性导航模块价格05.17传感器还可能具有交叉灵敏度,很多时候需要对此进行补偿,即使无须补偿,至少也需要加以了解。此外,惯性传感器的性能指标存在许多不同的标准,这使得上述问题的解决更加困难。当指定角速率传感器要求时,多数工业系...
-
 深圳LINS688惯性导航IMU05.17
深圳LINS688惯性导航IMU05.17新一代导航系统其实质是一种基于现代原子物理较新技术成就的微型惯性导航系统。惯性导航系统是人类较早发明的导航系统之一。早在1942年德国在V-2火箭上就首先应用了惯性导航技术。而美国凌思部高级研究计划局...
-
上海LINS-G202惯性导航厂家价格05.17
VR设备 VR头戴式设备主要使用这些IMU传感器来跟踪你的头部位置,以改变它发出的视频信号。例如,当你向上看时,你的头部实际上是绕X轴旋转的,这将被放置在你的虚拟现实耳机中的IMU传感器的陀螺仪感应到...
-
 武汉MMG200惯性导航价格05.17
武汉MMG200惯性导航价格05.17IMU 全称Inertial Measurement Unit,中文叫惯性测量单元,是用来测量物体加速度、角速度、磁场,高度等的元器件。惯性测量元件包括多种传感器,比如倾角仪、加速度计、陀螺仪、磁力计...
-
 青岛LMG918惯性导航模块价格05.17
青岛LMG918惯性导航模块价格05.17IMU的惯性导航实现原理基于牛顿凌思定律和旋转动力学原理,通过对物体的运动惯性进行测量与处理,计算出物体在空间中的加速度、方向和角速度等物理量,再通过数据处理和运算,得出精确的位置和运动信息。需要注意...
-
广州LINS300T惯性导航05.16
根据所用陀螺仪的不同,惯性导航系统分为速率型捷联式惯性导航系统和位置型捷联式惯性导航系统。 前者用速率陀螺仪,输出瞬时平均角速度矢量信号;后者用自由陀螺仪,输出角位移信号。 捷联式惯性导航系统省去了平...