工程车360全景影像系统模式:挂倒车档时强制在显示器上显示此模式。鸟瞰视图显示区由前、后影像放大单图及其对应辅助标志、前、后、左、右鸟瞰显示区组成。行车辅助系统左右视图模式:行驶过程中,启动左、右转向灯时启动此模式。左右视图显示区由左、右视图及辅助标志组成。行车辅助系统单图放大模式:泊车时根据客户需要,自由切换前、后、左、右单图放大视图,此模式必须通过遥控器完成。360全景辅助泊车:驾驶员在倒车过程中,只需要通过中控台的图像判断四周障碍物,可以提高倒车安全性能。工程车360全景系统周围物体变形小。深圳铲车360拼接算法

360全景环视系统的产生背景:随着图像和计算机视觉技术的快速发展,越来越多的技术被应用到工程车电子领域,传统的基于图像的倒车影像系统只在车尾安装摄像头,只能覆盖车尾周围有限的区域,而车辆周围和车头的盲区无疑增加了安全驾驶的隐患,在狭隘拥堵的市区和停车场容易出现碰撞和刮蹭事件。为扩大驾驶员视野,就必须能感知360°各处的环境,这就需要多个视觉传感器的相互协同配合作用然后通过视频合成处理,形成全车周围的一整套的视频图像,就是有这类需求,全景视觉泊车辅助系统应运而生。北京铲车360环影系统工程车360全景系统的选购需要关注360全景的每一个细节。

工程车360度全景可视泊车辅助系统的出现降低了事故发生几率。360度全景可视泊车辅助系统备了以下特点:全景影像,行车无忧、稳定可靠,安全性能高、画质更清晰,视点无死角、安全升级,性价比高。360度全景可视泊车辅助系统做到了第7代,它用了四个广角摄像头,广角在150度到180度之间,对图像进行了处理和显示,不是简单的将图像叠加起来,而是将图像处理后,中间是车子,将图像放在周边。360度全景可视泊车辅助系统已经升级到第八代,九代,行业内通常叫做无缝拼接360度全景。做到全车无盲点,无死角,把挡风玻璃遮挡住都可以安全无忧的倒车,泊车。
工程车360全景影像系统能把车身周围的图像实时传入驾驶室,方便驾驶员精确掌握近距离的环境特征。四部摄像机提供安全的360度全景视野。车头和车尾180度的广角镜头几乎可以让驾驶员视线从车头或车尾向左向右平移各90度,甚至还能在一定程度上“拐弯”服务,让驾驶员精确掌握近距离的环境特征。从盲区监视器到360°环景监视随着工程车技术的进一步发展,人们已经不再只满足于看到车辆后面的实时影像,对于其他盲区如车身侧面、前保险杠以及转弯时的死角等,都有了进一步探寻的需要。工程车360全景系统可以同时显示车身的影像。

如何挑选真正的工程车360全景?想要有更好的安全驾车辅助体验,就必须关注360全景的每一个细节,比如360全景的画面是否变形,还包括是否影响原车的驾驶系统、发生交通事故是否能够有效记录等应用,长时间运行是否流畅,以及人机交互操控的多样性等。工程车360全景究竟是什么,其实指的是依靠一套安装在工程车四周安装4个超宽视角的高清摄像头,通过软件进行无缝拼接的适时图像信息(鸟瞰图像),车主可以通过屏幕了解车辆周边视线盲区,帮助工程车驾驶员更为直观、更为安全地停泊车辆的和提供驾车辅助,所以又叫360工程车黑匣子或全景行车辅助影像系统。工程车360全景系统就是全景影像停车辅助系统。上海升降机360影像系统
工程车360全景系统要具有稳定运行的行车记录仪功能。深圳铲车360拼接算法
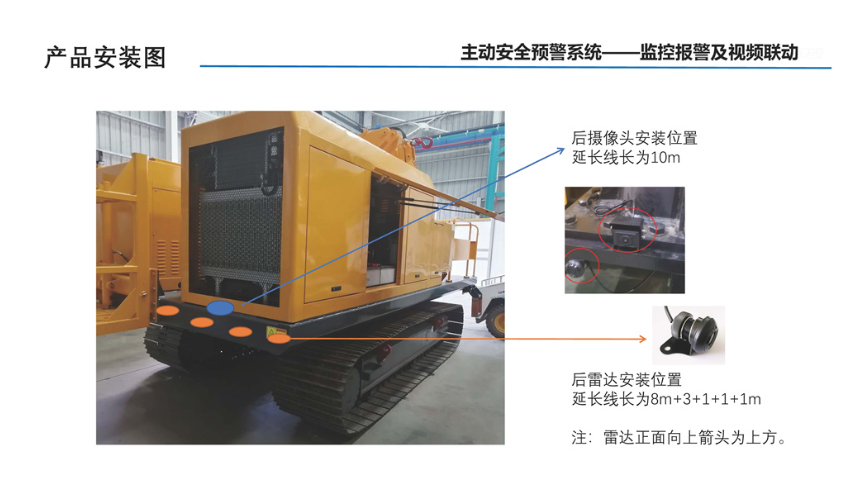
工程车360全景影像系统的工作原理:全景环视系统,它包括有:安装于工程车四周的多个摄像头、图像采集部件、视频合成/处理部件、数字图像处理部件、车载显示器;摄像头分别拍摄工程车前后左右的图像,图像被图像采集部件转换成数字信息送至视频合成/处理部件,视频合成/处理部件处理后的图像经由数字图像处理部件处理后转换成模拟信号输出,在安装于工程车内部的车载显示器上生成工程车及其周边环境的全景图像信息。360全景环视系统:它为工程车驾驶提供更为直观的辅助驾驶图像信息,在工程车辅助驾驶和工程车安全上有着非常好的应用前景。深圳铲车360拼接算法
广州精拓电子科技有限公司是一家其他型类企业,积极探索行业发展,努力实现产品创新。公司是一家有限责任公司企业,以诚信务实的创业精神、专业的管理团队、踏实的职工队伍,努力为广大用户提供***的产品。公司始终坚持客户需求优先的原则,致力于提供高质量的360全景影像,防碰撞预警系统,安全辅助驾驶系统,疲劳驾驶预警系统。精拓电子顺应时代发展和市场需求,通过**技术,力图保证高规格高质量的360全景影像,防碰撞预警系统,安全辅助驾驶系统,疲劳驾驶预警系统。