(第1篇)驾驶员状态监测预警集成到AI360全景影像系统的功能及应用场景
从技术功能实现、系统集成逻辑、实际应用场景及优越性三个维度,阐述 “驾驶员状态监测预警(DSM)集成到AI360全景影像系统” 的具体应用功能与整体系统的综合优势。
一、驾驶员状态监测预警(DSM)与AI360全景影像系统的集成功能详解
1. 功能模块概述该集成系统将两大核X子系统深度融合:
AI360全景影像系统:提供车辆四周无盲区视觉监控;
驾驶员状态监测系统(DSM):实时感知驾驶员行为异常并预警。两者通过统一的车载智能终端平台进行数据融合与联动控制,形成“人—车—环境”三位一体的安全闭环管理体系。
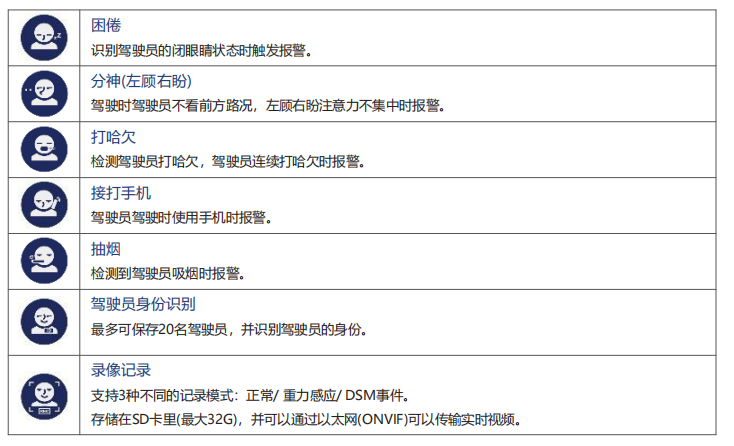
2. 驾驶员状态监测预警(DSM)的具体功能实现,DSM系统具备以下六大类主动监测与预警能力:
闭眼检测
检测内容:当持续闭眼时间超过阈值(通常≥2秒)时触发检测。
实现方式:基于红外摄像头结合AI算法分析眼部开合度。
输出响应:通过屏幕弹窗、语音报警及高电平信号输出进行提示。
打哈欠检测
检测内容:通过监测张口频率和持续时间判断疲劳程度。
实现方式:采用AI模型识别面部肌肉运动特征。
输出响应:与闭眼检测一致,触发疲劳驾驶报警(包括屏幕弹窗、语音报警及高电平信号输出)。
疲劳驾驶预警系统身份识别功能在多人共用车辆或特定驾驶员的场合,确保只经过授权的驾驶员才能驾驶车辆.北京物流车司机行为检测预警系统
(第4篇)精拓智能自带算法的驾驶员状态监测仪的功能优势及定制
特种车辆复杂环境作业
大型矿用自卸车辆:DSM通过车载总线与360全景、雷达互联,适应矿场振动环境和-30~70℃极端温度。当检测到驾驶员疲劳打哈欠时,360全景自动切换至车辆后方和侧方影像,雷达增强矿场道路障碍物检测,数据汇聚至全景主机后,可在矿场本地管理平台实时显示,便于调度中心统一管控。
工程建设特种车辆:如起重机、搅拌车,当DSM检测到驾驶员低头查看操作仪表时间过长时,360全景将吊臂或出料口影像实时显示在主屏幕;系统自检功能可监测DSM摄像头是否被灰尘、水泥遮挡,确保设备正常工作。
车队数字化与智能化管理
企业大型车队集中管理:通过车规T5处理器全景主机汇聚数据,云端平台可统一监控多车辆,管理者能查看每辆车的DSM驾驶员状态数据(闭眼、打哈欠次数等)、360全景的行驶轨迹和环境数据,以此制定针对性安全培训计划、优化排班;当DSM检测到危险状态时,平台自动预警并调取360全景实时画面,辅助远程决策。
智能物流园区车辆调度:物流园区内,DSM监测驾驶员分神行为,360全景监测园区人员、车辆动态;
贵州起重机司机行为检测预警系统疲劳驾驶预警系统能够记录驾驶员的驾驶状态,预警次数等数据,为后续的安全管理和分析提供重要依据.

(中篇)自带算法且具备视频同步输出功能的疲劳驾驶预警设备是一种集成了先进技术与智能算法的安全辅助设备,以下是对其的具体阐述:
同时,设备还可以将预警信息发送到后台系统,以便相关人员及时采取措施进行干预。
三、技术原理传感器采集:设备利用摄像头、红外线传感器等硬件设备,实时收集驾驶员的生理数据和周围环境信息。数据预处理:对采集到的数据进行去噪、滤波等预处理操作,以保证数据的可靠和准确。算法分析:通过图像识别、模式识别等算法对处理后的数据进行分析,判断驾驶员是否处于疲劳状态。这包括对驾驶员自身特征的检测(如生理指标、生理反应)以及结合车辆行驶状态的综合判断(如转向频率、刹车频率、行驶速度等)。预警策略:根据分析结果,设备会采取相应的预警策略,如发出声音或视觉信号提醒驾驶员。
(第1篇)驾驶员状态监测仪(DMS)功能特征及其在AI360全景影像系统中的集成应用
本文将对于精拓智能具备独LAI算法的驾驶员状态监测仪(DMS)的功能特征进行专业、详尽、条理清晰的梳理,并进一步阐述其如何深度集成至AI360全景视觉监控系统中,实现多模态智能安全协同控制。
一、驾驶员状态监测仪(DMS)的核X功能特征(独L算法模块)驾驶员状态监测仪作为一套具备独L图像处理单元与专YAI识别算法的车载智能感知设备,其核X能力体现在以下几个维度:
(一)高精度驾驶行为识别算法
1. 疲劳驾驶检测
闭眼识别:实时检测驾驶员闭眼时长 ≥3秒,触发预警。
打哈欠识别:持续张口动作 ≥2秒判定为疲劳性哈欠。
低头/眯眼识别:头部前倾或眼部微闭等姿态变化纳入疲劳判断逻辑。
分级报警机制:
初级预警:“叭~~”长音提示;
持续疲劳:“嘀嗒嘀嗒”急促声 + 红灯亮起。
2. 分心驾驶识别
头部侧偏检测:头部偏离正前方≥45°且持续时间≥3秒,触发“咚~~ 咚~~”蓝转红灯警告。
离岗检测:面部完全脱离摄像头视野≥3秒,发出“啲咑~啲咑”警示音。
违规行为识别:
手持电话使用:手靠近耳部并保持通话姿态≥7秒,语音播报“请勿打电话”。
DSM-7疲劳驾驶预警系统主机是疲劳驾驶预警系统的核XIN处理单元,负责运行算法,分析数据并发出预警.

(第1篇)精拓智能CL-880-2疲劳驾驶预警系统:矿区无网环境下的安全保障方案
一、系统独特功能:本地化与抗极端环境设计
全离线运行核X:神经网络算法本地化部署
系统内置神经网络人工智能视觉算法,通过摄像头与传感器实时采集驾驶员面部特征(眨眼频率、闭眼时长、头部运动)及体态数据,在设备端完成疲劳状态分析与预警,无需依赖云端计算或网络传输。
关键性能:疲劳特征趋势预警准确率达95%,危险驾驶行为识别响应时间<0.5秒,支持闭眼、打哈欠、左顾右盼等行为识别(准确率>99%)。
MDVR本地存储与数据闭环集
成车载数字视频录像机(MDVR),驾驶员影像、车辆轨迹、速度等数据直接存储于本地SD卡或硬盘,支持离线视频同步输出与历史数据追溯。网络恢复后可手动导出或补传,解决矿区网络波动导致的数据丢失问题。
多模态无网预警机制
提供声音预警(中文/英文语音)、方向盘震动、座椅震动等硬件级联动报警,预警信号通过设备端口直接触发,无需网络交互。驾驶员可根据习惯调节灵敏度,适配矿区复杂路况下的驾驶需求。
二、矿区场景专项优势:环境适配与安全强化
抗干扰光学成像与极端环境耐受性
疲劳驾驶预警系统通过实时捕捉并分析驾驶员的生物行为信息如眼睛、脸部特征等,判断驾驶员是否处于疲劳状态.贵州起重机司机行为检测预警系统
疲劳驾驶特征分析:结合头部姿态检测算法,分析头部相对于摄像头的三维旋转和平移,判断驾驶员的注意力状态.北京物流车司机行为检测预警系统
(第5篇)驾驶员状态监测预警集成到AI360全景影像系统的功能及应用场景
实时查看车辆位置与驾驶状态
回放危险瞬间的图像/视频片段
生成驾驶员行为评分报告,用于绩效考核与培训改进
三、集成系统的综合优越性分析
从多个维度对比,本集成系统相较于传统独L系统具有明显优势:
1,在安全性方面,传统独L系统各系统独L运行,无法协同预警;而本集成系统通过多传感器融合,实现“人因+环境”双重风险预警,能大幅降低事故概率。
2,智能化水平上,传统独L系统功能单一,依赖人工干预;本集成系统由AI深度学习算法驱动,具备自学习与自适应能力,识别准确率高。
3,安装与维护成本方面,传统独L系统需多套设备,布线复杂且故障点多;本集成系统采用统一主机架构,减少ECU数量,简化线路布局,降低了后期维护难度。
4,数据完整性方面,传统独L系统数据分散存储,难以关联分析;本集成系统采用统一加密存储机制,支持多维数据交叉检索,例如可查询何时何地因何原因发生疲劳等情况。
5,合规性保障上,传统独L系统难以满足ZUIX法规要求;本集成系统符合多项国家标准,包括GB/T 39263 - 2020(ADAS术语定义)以及JT/T794 - 2021和JT/T808 - 2021(定位终端技术与通讯协议)。
北京物流车司机行为检测预警系统