- 品牌
- 中军视觉,KVISIOAI
- 型号
- 齐全
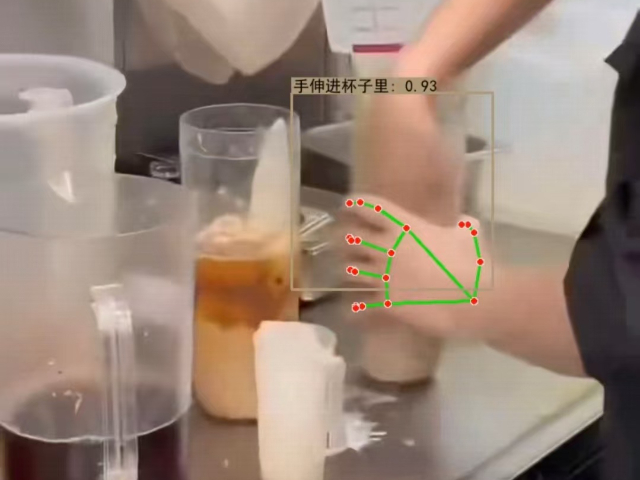
连锁奶茶店的饮品制作流程中,配料添加顺序与摇晃手法是决定口感的隐形关键。中军视觉智能SOP系统在操作台部署多视角视觉传感器,智能监控每一杯饮品的诞生过程。系统通过识别配料瓶身的标识与液面高度变化,验证果糖、果汁、奶精等组分的添加量是否符合标准配方。在雪克杯摇晃环节,系统分析操作员的握持姿势、摇晃频率与幅度,确保饮品混合充分且不过度起泡。对于需分层效果的饮品,系统还能监测倾倒速度与角度,保障层次分明。所有操作数据实时上传至云端,管理者可随时查看各门店的出品合规率,识别需加强培训的员工。这以技术手段实现了饮品口味的数字化标准化,让消费者无论在哪家分店,都能品尝到完全一致的品牌风味,极大增强了品牌忠诚度。晶圆探针测试前,系统校准探针卡与焊盘的对位精度,提升测试一次性通过率。金华人员SOP管理中军视觉智能SOP管理

汽车涂装车间的喷涂机器人路径编程与调试,传统上依赖示教与经验。中军视觉智能SOP系统引入了全新的离线仿真与在线验证闭环。首先,系统可对3D数模进行离线分析,生成优化的喷涂轨迹。在实际喷涂时,视觉系统实时跟踪机器人末端的喷枪姿态、扇面宽度以及相对于车身的距离,并与仿真轨迹进行比对。同时,通过监控漆膜在车身表面的形成状态(如湿润度、膜厚均匀性趋势),实时微调机器人速度或流量参数。这使得喷涂工艺从静态的“程序执行”升级为动态的“感知-决策-执行”闭环,明显提升了漆膜均匀性。盐城中军视觉智能SOP管理方案通过智能视觉分析,系统可提前预警设备异常征兆,助力实现预测性维护。

汽车铝合金轮毂的低压铸造,模具喷涂脱模剂是关键前置工艺。中军视觉系统在高温铸造单元旁稳定工作,监控喷涂机器人的运动轨迹与雾化状态。系统通过分析模具表面反光特性的变化,判断脱模剂涂层是否覆盖完整、厚度是否均一。同时,系统严格记录每次喷涂的周期时间,确保其在合模前拥有恰当的挥发时间。通过对这一环节的量化控制,有效减少了铸件因粘模、冷隔或气孔导致的报废,提升了轮毂的良品率与表面光洁度,让安全与美观从铸造之初就已注定。
汽车燃油滤清器的焊接与密封性测试中,视觉技术提供多方位保障。在超声波焊接工序,系统监测焊头下降速度与终末位置,确保焊接能量与时间受控。在密封性测试环节,系统观察工件浸入检漏液或置于检漏罩内时,有无连续气泡产生,并自动记录气泡产生的起始位置与时间。整个测试过程视频与结果数据自动关联,为每件滤清器产品提供可视化的密封性“体检报告”,将关乎发动机燃油系统清洁度的关键部件质量,以无可辩驳的数据形式固化下来。AI算法可识别设备仪表读数并自动记录,替代人工抄录避免差错,提升数据可靠性。
光学元件胶合定中心工序,需要将多个透镜在紫外固化前精确对准。中军视觉系统采用多光谱照明与高精度图像匹配技术,透过上层镜片清晰捕捉底层镜片的对准标记。系统实时计算镜片之间的偏心与倾斜误差,并指导精密调整机构进行自动对准,直至误差达到亚微米级。这不仅取代了人工在显微镜下的繁复调整,更将对准精度与效率提升了一个数量级,为制造高分辨率、低像差的复杂光学镜头组提供了关键工艺保障,广泛应用于安防、车载、医疗等领域的高阶成像系统。系统通过边缘计算实时分析视频流,响应速度快,绝不拖慢原有生产节拍。铜陵SOP智能质检中军视觉智能SOP管理
在半导体划片工序,系统监控切割深度与崩边情况,全力保护芯片结构完整。金华人员SOP管理中军视觉智能SOP管理
医疗注射器组装车间,无菌与精度是生命线。我们的智能SOP管理系统为此提供了无接触、高可靠的解决方案。在硅化、组装、压塞等工位,系统通过特殊的光学设计,清晰监测操作员的手部、工具与产品的交互动作。它能判断硅化过程中喷涂角度是否覆盖齐全,组装时芯杆与外套管的配合动作是否顺滑,压塞工序中胶塞的放置姿态是否端正。更重要的是,系统可联动环境监测传感器,在操作员手部意外越过无菌边界或洁净服穿戴不规范时即刻预警。所有过程数据与视频片段均可加密追溯,为医疗器械的安全生产与质量审计提供了坚实的数字化证据链。金华人员SOP管理中军视觉智能SOP管理
苏州中军视觉技术有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在江苏省等地区的电工电气行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**苏州中军视觉供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!
医疗输液袋的灌装封口生产线,对灌装精度与封口完整性要求极高。中军视觉智能SOP系统在高速产线上实现滴水不漏的监控。在灌装头下方,视觉传感器以极高的帧率拍摄每一袋药液的灌装过程,通过液面检测算法实时计算灌装量,动态反馈控制灌装阀。在封口工位,热成像与高亮背光视觉结合,检查封口区域的温度均匀性与密封纹路的连续性,任何微小的漏封、夹杂或压合不良都无所遁形。系统实现100%全检,并将每袋产品的灌装量、封口图像与生产批次绑定,形成了完整的单体追溯档案。医疗试剂分装工序,系统监控移液管液面高度,杜绝装量误差导致的检验结果偏差。铜陵中军视觉智能SOP管理方案连锁咖啡店的意式浓缩萃取,被视为咖啡师的灵魂技艺。...
- SOP智能质检中军视觉智能SOP管理软件 2026-04-27
- 温州标准SOP行为分析中军视觉智能SOP管理 2026-04-26
- 深圳工业SOP行为分析中军视觉智能SOP管理 2026-04-26
- 智能SOP AI 行为分析中军视觉智能SOP管理技术报告 2026-04-26
- 西安SOP质检AI行为分析中军视觉智能SOP管理 2026-04-26
- 常州SOP智能质检中军视觉智能SOP管理 2026-04-25
- 兰州中军视觉智能SOP管理解决方案 2026-04-25
- 唐山奶茶店中军视觉智能SOP管理 2026-04-25
- 扬州计算机视觉中军视觉智能SOP管理 2026-04-25
- 郑州汽车行业AI应用中军视觉智能SOP管理 2026-04-24


- 盐城人员SOP管理中军视觉智能SOP管理 2026-04-24
- 医疗SOP AI行为分析中军视觉智能SOP管理平台 2026-04-23
- 智能SOP AI 行为分析中军视觉智能SOP管理软件 2026-04-23
- 计算机视觉中军视觉智能SOP管理平台 2026-04-23
- 杭州SOP质检AI行为分析中军视觉智能SOP管理 2026-04-23
- 包装AI中军视觉智能SOP管理项目 2026-04-23

- 医疗SOP AI行为分析中军视觉SOPAI质检算法 05-10
- 铜陵中军视觉AI技术 05-10
- 包装AIAI-SOP品控 05-10
- 重庆中军视觉中军视觉AI 05-10
- 肇庆生产AI视觉AI-SOP 05-10
- 盐城AI-SOP操作 05-10
- 汽车零部件AI质检AI-SOP操作 05-09
- 沈阳奶茶店AI-SOP 05-09
- 湘潭汽车零部件AI质检AI-SOP 05-09
- 马鞍山AI质检行为分析中军视觉SOPAI质检 05-09