装载机作业时,因铲斗、车身结构等因素存在较大盲区,在矿山、工地等复杂场景中,易与周边的人员、其他工程车辆或堆放物发生碰撞。针对这一问题,装载机盲区防碰撞预警系统应运而生,该系统由安装在车身侧面、后部的毫米波雷达和红外传感器,驾驶室内的液晶显示屏及声光报警装置组成,可实时监测盲区范围内的移动物体和固定障碍物。系统具备精确识别与分级预警功能,能将盲区目标的距离、类型等信息在显示屏上清晰标注;当目标处于安全预警距离时,触发一级预警,显示屏对应区域亮起黄色灯光,同时发出 “盲区有目标,减速观察” 的语音提示;若目标进入危险距离,立即启动二级预警,红色灯光快速闪烁,语音变为 “盲区紧急,立即停车”,并伴随操作杆震动,多方位提醒驾驶员及时应对,有效降低装载机作业时的碰撞风险。车辆防碰撞预警系统可智能分析工程车行驶轨迹,当与障碍物距离过近时,迅速发出声光提醒,保障作业安全。北京主动安全防碰撞预警定制设计
港口集装箱卡车作业环境繁忙,堆场里集装箱林立,往来车辆众多,碰撞事故频发。佳兴伟诚为港口集装箱卡车打造的防碰撞预警系统,是应对这种环境的利器。系统在卡车前后及两侧安装广角雷达,能穿透集装箱之间的缝隙,探测到隐藏的车辆和人员。当卡车靠近堆垛的集装箱时,系统会提前预警 “注意右侧集装箱”;当与其他作业车辆交会距离过近,会即时播报 “左侧有卡车靠近,减速避让”。系统还能识别集装箱的位置和高度,在吊装集装箱时,辅助司机判断与吊具的距离,避免碰撞损坏货物。该系统适应港口的高温、高湿环境,稳定性强,为港口装卸效率和安全提供双重保障。拉萨工程车辆行人防碰撞预警方案依靠人工智能技术的工程车防碰撞预警系统,能不断学习和适应新的驾驶场景,持续提升预警性能。
预警方式丰富多样且直观有效。驾驶室内的车载显示屏会用醒目的颜色和图标标注出危险目标的位置,并显示其与车辆的实时距离。同时,蜂鸣器会发出急促的警报声,随着危险程度的增加,警报声的频率也会加快,以引起驾驶员的高度注意。对于一些大型工程车辆,还配备了外部声光报警装置,不提醒驾驶员,也能让车辆周围的人员及时察觉到危险,从而采取相应的避让措施。该系统在多种车辆类型和应用场景中都发挥着重要作用。对于公交客运车、校车等公共交通工具而言,其庞大的车身导致存在较多盲区,该系统能够有效消除这些盲区带来的安全隐患,保障乘客和行人的安全。在建筑工地上,挖掘机、装载机等工程车辆在作业时,周围环境复杂,人员流动频繁,360 全景盲区防碰撞预警系统能够帮助驾驶员及时发现靠近的施工人员和障碍物,避免发生碰撞事故。在物流园区,叉车、集装箱卡车等车辆在狭窄的通道内行驶和作业,该系统能够提供无死角的视野,防止车辆碰撞货架和其他车辆。
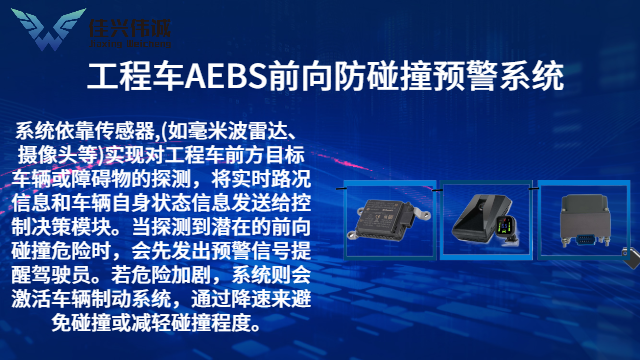
工程车的 “视线死角” 成因复杂,或因车身结构遮挡,如混凝土搅拌车的旋转筒挡住右侧 3-5 米范围;或因作业环境复杂,像矿山工地的粉尘会让能见度降至 5 米以下。佳兴伟诚盲区防碰撞预警系统凭借先进技术,成为解决难题的关键。其搭载的激光雷达扫描频率达 10Hz,可精确测量 0.3-10 米内障碍物距离,误差不超过 5 厘米;配合红外摄像头,在夜间无光环境中也能清晰成像,识别行人准确率达 95%。数据经车载芯片 0.1 秒快速处理后,以彩色标注的方式在显示屏呈现,让原本的 “盲区” 变得透明可见,技术实力为安全保驾护航。工程车防碰撞预警系统利用高精度传感器,实时监测车辆周边环境,准确识别潜在碰撞风险,为司机提前预警。

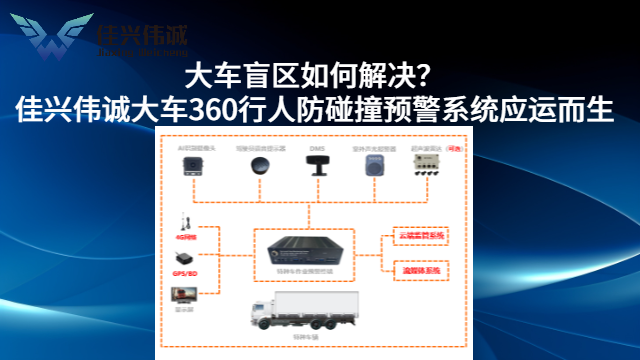
工程车辆 360 全景实时盲区防碰撞预警系统功能丰富,可直接与倒车雷达连接,也适用于自动化机械设备、配电箱等。其外观小巧,报警音量达 105dB,有旋转、闪烁等 4 种灯光模式,工作方式包括通电触发报警、信号触发、RS485 通讯控制。该系统能在车辆启动、左右转弯、倒车及右侧盲区等场景进行对应语音播报,还支持客户定制语音和不同语种播报。与 360° 全景 AI 预警主机配合使用时,可自动检测驾驶员四周视野盲区,出现车辆或移动物体时发出告警,通过喇叭提示,显示动态轨迹,提供全天候无盲区车周实时画面。结合物体识别算法及智能 ADAS 物体识别算法,能实时处理车道线及车周物体,提前判别危险区域,减少刮伤、碰撞等事故,提升行驶安全。防碰撞预警系统实时监测盲区,结合摄像头识别目标,声光提醒驾驶员,减少因视线受阻引发的碰撞事故。拉萨工程车辆行人防碰撞预警方案
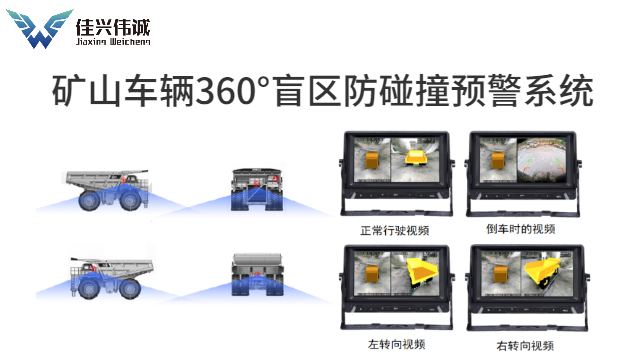
佳兴伟诚矿山车辆盲区防碰撞预警系统。北京主动安全防碰撞预警定制设计
在矿山作业中,车辆运输对生产流程顺畅至关重要,但矿山路况复杂、车辆多,且灰尘多、视线差,车辆碰撞事故风险高。为此,佳兴伟诚推出矿山车辆前后防碰撞预警系统,为矿山运输安全提供可靠技术保障。该系统采用先进的传感器融合技术,集成毫米波雷达与高精度传感器。毫米波雷达能全天候工作,不受恶劣天气和光线影响,精确测量车辆前后方障碍物或其他车辆的距离、速度和角度;摄像头通过图像识别对监测区域物体分类识别。再经传感器融合算法深度融合两者数据,实现对车辆周边环境的精确感知。同时,系统运用深度学习和人工智能算法,实时分析传感器数据。通过学习大量矿山场景数据,准确识别不同危险情况并分级;还能计算本车与前后方目标的相对运动趋势,预测碰撞风险,提前为驾驶员提供预警。北京主动安全防碰撞预警定制设计