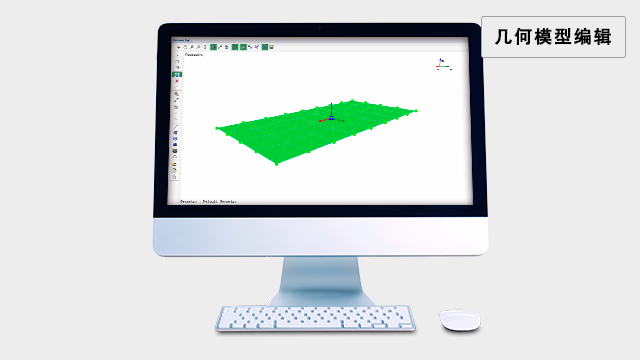
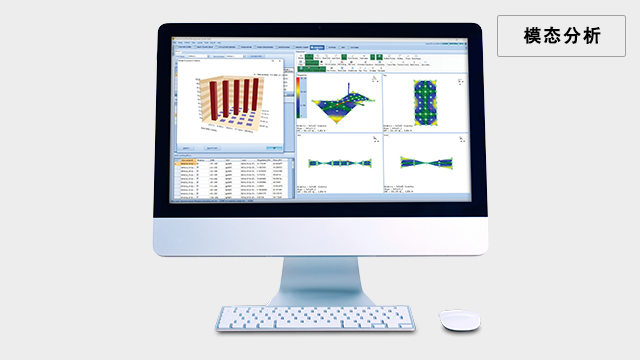
模态分析软件EDMModal的模态几何模型编辑/ODS/动画三个模块是EDM模态分析软件的基础模块,包含在每个EDM模态测试系统。它们提供几何结构模型生成和模态测试及分析结果的全3D可视化。点/线/面是几何模型编辑的基本元素,其操作包括增加/删除/修改。组件被定义为几何模型的一部分,每个组件相对**,包含**的方向和欧拉角。预置的组件库包括线、面板、立方体,圆柱体和球体,通过原点,方向,尺寸和组件的单元格的数目,它们能作为几何模型的一部分,编辑的几何模型可以导出保存,并可被其他测试再次使用。清空当前模型操作方便用户创建一个新模型。导入操作支持多种第三方格式的模型,比如UFF,XML,Obj。几何模型常用的功能是运行振型动画,运行动画是可选择需要显示的内容,包括点,线,面,标签等元素。动画的视图模式可以设置为单一******视图或四视图(******/顶部/侧面/正面)。保存视频功能可记录模态的一个动画周期数据到AVI文件。环境激励下高层建筑工作模态分析。宁波FRF模态

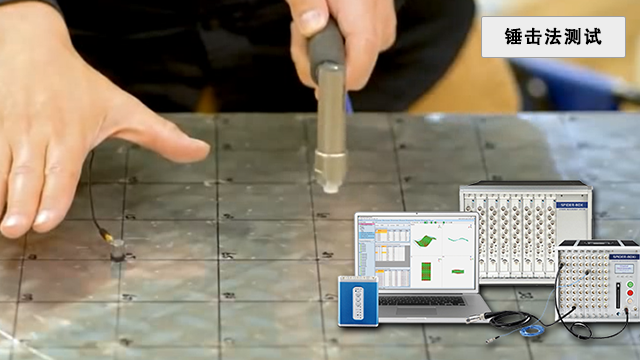
在机器人竞赛中,获胜者试图通过造成伤害或破坏关键部件来摧毁对手。在设计研发过程中,工程师通过模态试验获得机器人的固有频率、阻尼和模态振型,帮助识别结构中的薄弱环节。因此,模态分析获得机器人的模态参数,对机器人的设计和性能优化具有重要意义。锤击法模态试验,采用力锤和单轴加速度传感器。由力锤激励的脉冲具有很宽的频率范围。为避免巡回响应法产生的质量附加效应,采用巡回激励法进行模态试验。使用Spider-80X硬件和***版。 浙江锤击法模态测试设备试验模态分析中频率工作扰度形状(ODS)分析。
锐达客户使用Spider-80M硬件系统和EDM-Modal模态分析软件对他们的飞机进行地面振动测试(GVT)。这个试验使用4个模态激振器来激励飞机,100个加速度传感器采集飞机的响应,以测量多参考频响函数(FRF)数据集。试验采用突发随机输出激励,采用p-LSCF频域曲线拟合算法(Poly-X)对多输入多输出(MIMO)数据进行处理,提取模态参数。四个用于激励飞机的模态激振器被安装在不同的位置。创建飞机线框模型,根据EDMModal软件中创建的网格,在测量点上安装100个加速度传感器。相应配置力传感器和加速度传感器的输入通道参数。
扩展头通常用于垂直环境试验。使用扩展头的目的是扩大振动台顶部的面积,以容纳安装大尺寸试验结构。每个扩展头的工作频率范围是振动台的关键参数之一。在振动试验中,通常用扩展头的一阶谐振频率作为工作频率范围的上限。为了确定该扩展头的频率响应特性,将扩展头安装在振动台动圈顶部进行模态试验。参考点位置选择在动圈上,在该位置粘贴加速度传感器,扩展头顶部传感器相对参考点传感器的传递率反应扩展头对振动的放大和衰减情况。扩展头对振动的放大和衰减情况可以帮助用户确定比较大工作频率。扩展头顶部平面用7x7的网格划分,共49个测量点。我们用Spider-80M进行试验,通过巡回传感器的方法每次测量7个测量点。在EDMModal软件里新建MIMOFRF测试,用宽频带随机激励信号激励扩展头。通过各种实验尝试,我们选择了突发随机信号类型。频率范围选择,覆盖了高达2000Hz的频率成分。这是对HES1200扩展头进行的***轮模态试验。下一步是对扩展头做阻尼处理,然后重复进行相同的模态试验,比较机械结构的频率响应和模态特征是否发生变化。 高铁车轮的模态分析。

在振动控制系统领域,杭州锐达数字技术有限公司凭借深厚的技术沉淀与专业积累,成为行业内备受瞩目的佼佼者。作为美国晶钻仪器公司中国总代理,锐达数字不仅拥有 COCO-80X/90X、Spider 系列等先进的振动控制系统产品,更构建起完善的技术支持与维护体系。无论是多轴振动控制系统在航空航天复杂振动环境模拟中的精细应用,还是手持一体化动态信号分析系统在工业现场的便捷检测,锐达数字都能凭借专业的技术团队,为客户提供从产品选型、安装调试到后期维护的全流程服务,确保振动控制系统高效稳定运行,助力客户攻克各类振动控制难题。工作模态测试专门用于外场环境振动数据测试,只测量和处理环境振动响应的数据。重庆工作模态分析方案
步进正弦模态测试是一个专门的测试类型,通过单个或多个激振器输出正弦信号获得FRF信号。宁波FRF模态
其振动控制系统涵盖了从基础的单通道设备到复杂的多轴振动控制系统,能够满足不同行业、不同规模企业的多样化需求。在电子电器行业,锐达数字的振动控制系统可模拟产品在运输、使用过程中的振动环境,提前检测产品的抗振性能,有效降低产品售后故障率;在科研院校的实验室,该系统则为科研人员提供了稳定、可控的振动测试平台,助力各类振动相关课题的深入研究。结构控制设备的可靠性直接关系到工程结构的安全与稳定,杭州锐达数字技术有限公司深谙此道。公司提供的远程状态监测系统,通过先进的传感器技术与数据传输技术,可实现对结构状态的实时、远程监测。宁波FRF模态