- 品牌
- 爱尼卡尔,美途全景
- 型号
- 齐全
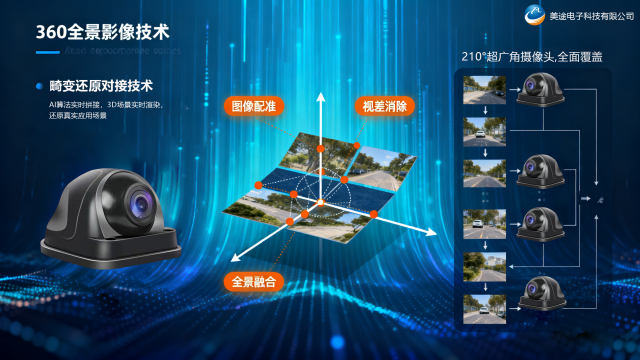
大车 360 度全景影像系统并非简单的摄像头拼接,而是一套集成 “采集 - 处理 - 显示” 的完整辅助驾驶体系。其工作流程可分为三步:首先,通过安装在车身关键位置的多颗高清摄像头,实时采集车辆周围环境画面,确保画面无卡顿;其次,图像处理芯片会对多路画面进行畸变矫正、色彩校准和边缘融合,能在 0.1 秒内完成 4/6 路画面的拼接,避免因延迟导致司机误判;融合后的 360 度全景视图会直观呈现在驾驶室内的 10.1英寸高清显示屏上,画面分辨率达 1920×1080,支持分屏显示(如左侧全景、右侧特写),让司机能清晰观察车辆周边 3-8 米范围内的所有动态,无论是行人、非机动车还是低矮障碍物,都能一目了然,有效填补传统驾驶视野的空白.美途 360 全景操作人性化,新手也能迅速学会基本使用方法。成都挖掘机360度全景影像AI智能警报

为规范大车 360 度全景影像系统的质量,国家交通运输部于 2023 年正式发布了《商用车辆驾驶辅助系统技术要求》(GB/T 42520-2023),该标准对系统的技术参数、性能指标、安全要求等作出了明确规定,确保市场上的产品质量达标。技术参数方面,标准要求系统的摄像头分辨率不低于 720P(1280×720 像素),推荐采用 1080P 分辨率;画面延迟(从摄像头采集画面到显示屏显示的时间)不超过 100 毫秒,避免因延迟导致司机误判;摄像头的防护等级不低于 IP67,在恶劣环境下能正常工作。在性能指标方面,标准要求系统的盲区覆盖范围需达到车身周边 3 米以上,内轮差区域的显示误差不超过 10 厘米;夜间夜视功能在无路灯环境下,需能清晰识别 5 米范围内的行人。在安全要求方面,标准规定系统需具备故障报警功能,当摄像头、处理器等部件出现故障时,需在 3 秒内发出声光报警;系统的预警功能需符合人体感知习惯,避免过度预警干扰司机驾驶。该标准的实施,为企业生产、车辆加装提供了统一的技术依据,有效杜绝了劣质产品进入市场,保障了大车司机的使用安全和权益。农机类360度全景影像拼接算法美途电子严控品质,全景镜放磕碰,耐用性经严苛测试,无惧复杂环境。

大车倒车操作一直是驾驶难点,尤其是半挂牵引车,因主挂之间存在角度差,倒车时车身轨迹呈 “折线型”,新手司机往往需要反复调整方向盘,不仅耗时还易剐蹭。360 度全景影像系统针对大车倒车场景进行了专项优化:当司机挂入倒挡后,系统会自动切换至 “后视 + 全景” 双视图模式 —— 左侧显示屏显示车辆周边完整的 360 度全景,右侧则放大显示车后特写画面。某物流园司机反馈,安装系统前,他倒车进入狭窄装卸车位平均需要 5-8 分钟,还需助手在车外指挥;安装后,无需助手协助,2 分钟内即可完成倒车对位,且从未发生过剐蹭货台或障碍物的情况,大幅提升了装卸货效率。
360 度全景影像系统给大车司机带来的实际驾驶体验提升非常明显,多位货车司机在使用后反馈了具体的感受和变化。来自山东的货运司机王师傅表示,他驾驶的是一辆总长 13 米的半挂车,以前在窄路会车或进入小区送货时,因担心剐蹭,每次都要下车查看路况,平均每次运输要下车 3-4 次,每次耗时 5-10 分钟;安装系统后,通过显示屏就能清晰看到车身周边的距离,无需再下车查看,平均每次运输可节省 10-15 分钟,尤其是在送货高峰期,能多完成 1-2 单配送任务。来自河南的李师傅则反馈,在夜间行车时,系统的夜视功能帮了大忙 —— 以前夜间在无路灯的国道行驶,总担心路边有行人或非机动车,只能低速行驶;安装系统后,红外补光功能能清晰显示路边动态,他可以放心地保持正常车速,夜间运输效率提升了 25%。还有多位司机提到,在倒车入库、装卸货对位等操作上,系统让他们更有信心,以前需要助手在车外指挥,现在独自一人就能完成,不仅减少了人力依赖,还避免了因助手指挥失误导致的事故,整体驾驶体验更轻松、更安全。美途 360 全景支持不同显示设备,画面稳定传输。
针对挖掘机回转作业时 “内轮差盲区”“铲斗盲区” 致命痛点,美途定制 360 度全景影像方案。在挖掘机回转平台侧面(距地面 1.5 米)、铲斗根部、前后左右加装 4 颗超广角摄像头,覆盖车身周边 8-10 米范围,尤其强化回转半径内 3 米中心危险区。当挖掘机启动回转动作时,通过 AI 算法识别人员、施工设备、等目标,用红色框标注并触发预警:语音提醒驾驶员,车外声光报警器提醒行人车辆请勿靠近,从根源避免回转碾压事故,适配矿山、基建等复杂工地场景。美途电子秉持创新理念,将 AI 技术融入全景影像,让驾驶更智能。成都拖拉机360度全景影像无盲区
自动拼接无需手动!美途全景图像处理单元高效运作,画面生成零延迟。成都挖掘机360度全景影像AI智能警报
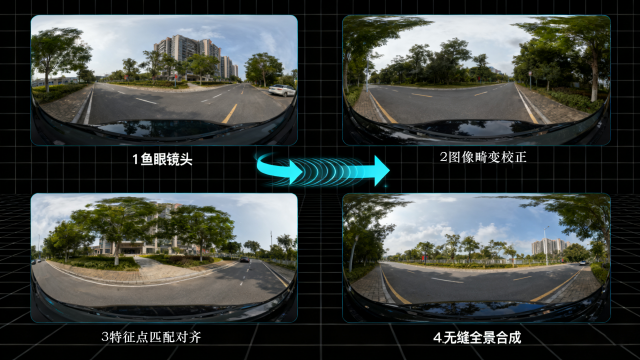
由于大车 360 度全景影像系统的摄像头需覆盖广阔视野,采用 210 度的广角镜头,而广角镜头的物理特性决定了原始画面会出现边缘畸变 —— 画面中心区域正常,但边缘区域的物体(如道路标线、行人)会被拉伸变形,若不进行矫正,会导致司机对物体的实际位置、尺寸判断失误,反而增加安全风险。为此,系统搭载了专业的畸变矫正算法,该算法基于摄像头的光学参数(如焦距、视角)建立数学模型,对每帧画面的边缘像素进行实时修正。具体来说,算法会先识别画面中的直线元素(如道路标线、护栏),再根据预设的矫正曲线,将边缘拉伸的直线恢复为正常形态,同时确保画面中心与边缘的比例一致 —— 比如原本因畸变变成曲线的道路标线,经矫正后会恢复为笔直的线条,且标线的宽度在画面各区域保持均匀。此外,算法还会对画面的色彩、亮度进行边缘补偿,避免矫正后画面出现 “边缘偏暗” 或 “色彩断层” 的问题,确保拼接后的全景视图整体协调,让司机看到的画面与实际环境的比例完全一致,不产生视觉误导.成都挖掘机360度全景影像AI智能警报
四川美途电子科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在四川省等地区的汽摩及配件中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来四川美途电子科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!
- 泊车辅助360度全景影像行人识别 2026-05-08
- 陕西360度全景影像停车监控 2026-05-07
- 自制360度全景影像批发 2026-05-07
- 多久360度全景影像批发 2026-05-07
- 广东360度全景影像批发 2026-05-07
- 北京360度全景影像安装方案 2026-05-07
- AI防撞360度全景影像鸟瞰视角 2026-05-07
- 四路监控360度全景影像供应商 2026-05-07
- 地方360度全景影像触屏 2026-05-07
- 远程监管360度全景影像市场价 2026-05-07
- 福建360度全景影像供应商 2026-05-07
- 360全景环视360度全景影像广角摄像 2026-05-07