第四步:偏差计算与调整量输出这是体现仪器“智能化”的关键环节,通过内置的对中算法(基于几何原理推导),将换算后的偏差量转化为“可直接操作的调整量”,具体逻辑如下:偏差类型判断:算法首先区分偏差类型——是“*平行偏差”(两轴平行但中心线不重合)、“*角度偏差”(两轴中心线相交但不平行),还是“...
快速对中校正仪基本参数
- 品牌
- HOJOLO,LEAKSHOOTER,SYNERGYS
- 型号
- AS500
- 类型
- 激光对中仪
- 重量
- 0.8
- 产地
- 苏州
- 厂家
- 汉吉龙测控技术有限公司
快速对中校正仪企业商机
利用已知精度的标准工装或模拟对中装置,实际操作仪器进行测量,对比“仪器读数”与“标准值”的偏差,验证精度是否稳定。此方法贴近现场使用场景,更具实际参考意义:1.HOJOLO激光对中仪的标准件测试(**典型)准备“标准对中工装”(由固定基座、可调节的“模拟轴”、精度已知的“偏差调节机构”组成,如可精确设置“径向偏差、角度偏差°”),按以下步骤测试:步骤1:将仪器的发射端、接收端分别固定在标准工装的两个“模拟轴”上,按仪器操作流程完成安装校准;步骤2:通过工装调节机构,设置1~3个典型偏差值(如“径向°”“径向°”,覆盖自身设备的常见对中偏差范围);步骤3:记录仪器的“测量值”,与工装的“标准偏差值”对比,计算“偏差率”(偏差率=|测量值-标准值|/标准值×100%)。合格判定:偏差率需≤仪器出厂精度的“允差范围”,例如仪器标注径向精度±5μm,若标准值(100μm),测量值偏差需≤5μm,即偏差率≤5%,否则精度不达标。 高效校准,节省成本!快速对中校正仪。CCD快速对中校正仪使用视频
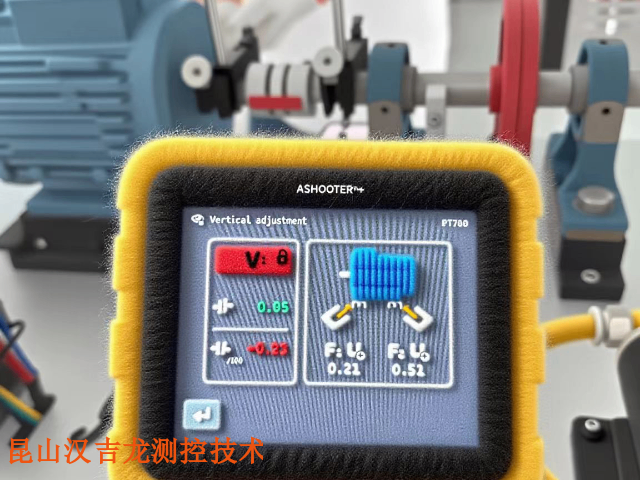
看得见的精确!快速对中校正仪:偏差实时显,调完直接投产在工业设备运维中,“对中是否精确”“调整是否到位”“能否快速恢复生产”是运维人员****的诉求。快速对中校正仪凭借“偏差实时可视化”与“校准即投产”的**优势,打破传统对中作业“盲调、反复校验、投产延迟”的痛点,让对中过程从“依赖经验判断”转变为“数据实时可控”,具体价值与实现逻辑如下:一、“看得见的精确”:实时可视化,偏差无隐藏快速对中校正仪的“精确可见”,并非简单的数值显示,而是通过多维度、动态化的可视化设计,让运维人员直观掌握轴系偏差的“位置、大小、调整方向”,彻底消除传统方法的“信息差”:1.动态图形化展示:偏差直观可感传统对中(如百分表法)需人工记录不同角度的读数,再通过公式换算偏差,过程抽象且易出错;而快速对中校正仪通过高清屏幕实时输出图形化偏差界面。 昆山快速对中校正仪保修从 2 小时到 3 分钟!快速对中校正仪,让设备对位效率飙升 600%。

第三步:信号处理与坐标换算接收单元采集的“光斑坐标数据”是原始电信号,需通过仪器内置的微处理器(MCU/CPU)进行信号处理与坐标换算,将“光斑偏移量”转化为“轴系偏差量”,**步骤包括:信号滤波:通过数字滤波算法(如卡尔曼滤波、滑动平均滤波)去除环境干扰(如振动、光线变化)导致的噪声信号,保留真实的光斑偏移数据。坐标映射:仪器出厂前已通过校准,建立“光斑在感光芯片上的坐标偏移量”与“两轴实际偏差量”的映射关系(例如:光斑在X轴偏移1mm,对应两轴径向偏差)。微处理器根据该映射关系,将实时采集的光斑坐标换算为两轴的径向位移值(平行偏差相关)和角度倾斜值(角度偏差相关)。单位统一:自动将换算后的偏差量转换为工业常用单位(如mm、mil、度、分),避免人工换算误差。
快速对中校正仪主要有激光对中、红外热成像和振动分析等工作原理,具体如下:激光对中原理:快速对中校正仪通常搭载激光测量系统,如AS轴对中校准测量仪采用635-670nm半导体激光发射器,输出高稳定性激光束。通过在相连轴上精细安装激光发射与接收传感器,仪器精确比较激光束位置,以此判断轴是否处于理想对中状态,并量化径向、轴向偏差及角度偏差数值。仪器内置高精度数字倾角仪,可实时修正设备因安装不水平或外界因素干扰导致的倾斜误差,同时结合温度传感器,自动补偿设备运行中因热胀冷缩产生的尺寸变化,以确保测量基准的准确性和测量结果的高精度。快速对中校正仪:适配风机、压缩机,对中校准全覆盖。
红外热成像原理:部分快速对中校正仪集成红外热成像功能,如 AS 轴对中校准测量仪搭载 FLIR LEPTON 160×120 像素红外热像仪,热灵敏度高,测温范围广。其原理是利用物体表面温度不同而辐射出不同强度的红外线,通过红外热像仪捕捉设备表面的红外辐射,转化为可视的热图像,从而快速、直观地检测设备温度分布。通过对比设备对中前后的红外热图像,能够直观判断因轴系不对中导致的轴承、联轴器等部位过热现象,也可精细定位电机绕组短路、电气接头接触不良等非旋转部件的热缺陷。快速对中校正仪:解决长期不对中问题。昆山快速对中校正仪校准规范
快速对中校正仪的传感器精度有多高?CCD快速对中校正仪使用视频
HOJOLO快速对中校正仪采样数据与偏差的关联仪器通过旋转两轴(通常旋转360°),采集不同角度下(如0°、90°、180°、270°)的径向位移数据,假设采集到主动轴与从动轴在“联轴器近端”(靠近联轴器的支撑点)和“联轴器远端”(远离联轴器的支撑点)的位移差,通过以下公式计算偏差:角度偏差计算:α=arctan[(δ远-δ近)/L]×(180/π),其中L为两支撑点之间的距离(轴长);平行偏差计算:δ=(δ远+δ近)/2(取近端与远端偏差的平均值,反映整体平行偏移)。3.调整量计算:从偏差到可操作值以“电机(主动轴)与泵(从动轴)对中”为例,电机通过前脚和后脚固定在底座上,算法根据偏差值计算前脚和后脚的调整量:若存在角度偏差α,则前脚调整量=α×L前/(180/π),后脚调整量=α×L后/(180/π)(L前为前脚到联轴器的距离,L后为后脚到联轴器的距离);若存在平行偏差δ,则前脚与后脚调整量相同=δ(需同时升高/降低前脚和后脚,确保两轴平行)。上述公式均由仪器内置算法自动执行,运维人员无需手动计算,*需根据仪器输出的“前脚调整XXmm、后脚调整XXmm”直接操作,这也是其“降低技能要求”的**逻辑之一。CCD快速对中校正仪使用视频
与快速对中校正仪相关的文章

昆山快速对中校正仪演示
- 汉吉龙快速对中校正仪使用方法图解 2026-05-28
- 质量快速对中校正仪哪里买 2026-05-27
- 转轴快速对中校正仪定做 2026-05-27
- 无线快速对中校正仪制造商 2026-05-08
- 耦合快速对中校正仪激光 2026-05-06
- 常见快速对中校正仪使用方法图解 2026-05-05
- 工厂快速对中校正仪特点 2026-05-01
- 昆山快速对中校正仪维修 2026-04-30
- 激光快速对中校正仪定做 2026-04-27
- 多功能快速对中校正仪厂家 2026-04-27
- 电机快速对中校正仪连接 2026-04-27
- 工厂快速对中校正仪电话 2026-04-26
与快速对中校正仪相关的产品



与快速对中校正仪相关的新闻
-
瑞典快速对中校正仪使用视频 2026-04-19 09:02:30快速对中校正仪通过多种方式降低了运维人员的技能要求,具体如下:操作界面直观简洁:许多快速对中校正仪配备了图形化的操作界面和触摸屏,以直观的方式显示测量数据和操作指引。例如AS轴对中校准测量仪,其,以绿、黄、红三色直观标记轴同心度偏差范围,操作人员无需复杂培训,即可清晰掌握设备状态。自动化...
-
常见快速对中校正仪厂家 2026-04-18 01:03:07第五步:结果可视化与报告生成仪器通过高清屏幕以图形+文字的形式输出**终结果:图形化:展示两轴的偏差示意图(如红色箭头标注偏差方向,柱状图对比调整前后偏差值);文字化:明确标注“当前平行偏差XXmm”“当前角度偏差XX度”“调整完成后偏差XXmm(是否合格)”;报告生成:部分机型支持通过...
-
昆山快速对中校正仪哪家好 2026-04-18 08:03:20多种功能适应重型设备复杂工况:重型设备在运行过程中可能会受到热膨胀、振动等因素的影响,导致轴系对中出现偏差。快速对中校正仪具备多种功能来应对这些复杂工况。如AS500激光对中仪集成了激光对中、红外热成像与振动分析三大**技术,可从“几何精度-温度场-振动特征”多维度监测设备状态,其内置数...
-
法国快速对中校正仪特点 2026-04-18 07:03:00汉吉龙快速对中仪采集维度:同步捕捉“径向+角度”双维度数据为完整描述轴系偏差,传感器需同步采集两类关键数据,且采样频率极高(通常≥100Hz,即每秒采集100次以上),确保“实时性”:径向位置数据:通过两个垂直方向(如水平X轴、垂直Y轴)的传感器,捕捉两轴在“水平方向的偏移量(如左偏/右偏)”和“垂...
与快速对中校正仪相关的问题
新闻资讯
产品推荐
-

租用镭射主轴对准仪企业
2026-05-28 -

专业联轴器对中服务连接
2026-05-28 -

法国激光对中服务制造商
2026-05-28 -

AS500泵轴热补偿对中仪定做
2026-05-28 -
原装进口便携同心度检测仪定制
2026-05-28 -

设备振动激光对中仪操作步骤
2026-05-27 -

质量快速对中校正仪哪里买
2026-05-27 -

汉吉龙测控镭射主轴对准仪装置
2026-05-27 -

synergys联轴器对中服务贴牌
2026-05-27