足底压力采集系统,则是通过力学传感器矩阵将趾骨、第二到第四趾骨、跖骨、第二跖骨、第三跖骨、第四跖骨、第五跖骨、足弓、足跟等足部受力位置的足底压力信号转换成电信号,然后通过信号处理模块的放大滤波之后,经由模数转换模块转变为数字信号,并通过串口通信将数据上传到系统软件中。系统软件将采集来的数据进行处理并保存为相应格式文件。同时,软件对数据进行提取、处理、以及生成曲线图、直方图的功能,直观地呈现出易于接受的图形化界面,便于进行分析。足底压力的大小取决于多种因素,包括体重、步态、鞋子类型以及所站立或行走的表面等。点阵式足底压力矫正

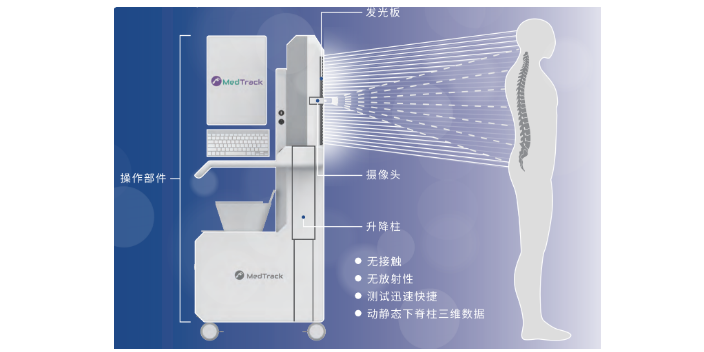
步态(gaiD是人类步行的行为特征,涉及行为习惯、职业、教育、年龄及性别等因素,也受到多种疾病的影响。步行的控制十分复杂,包括中枢命令,身体平衡及协调控制,涉及下肢各关节和肌肉的协同运动,同时也与上肢和躯干的姿势有关。任何环节的失调都可能影响步行和步态,而异常也有可能被代偿或掩盖。步态分析(gaitanalysis就是研究步行规律的检查方法,旨在通过生物力学和运动学手段,揭示步态异常的关键环节及影响因素,从而指导康复评估和诊疗,也有助于临床诊断、疗效评估及机理研究等。步态足底压力科研将足压数据上传至云端,医生远程评估患者康复进展或糖尿病足风险。
常用的步态分期方法有两种:一种是传统划分法,主要是以足能否着地为基础划分,将步态周期分为足跟着地、全足着地、站立中期、足跟离地、足尖离地、加速期、迈步中期、减速期共八个时期。另一种是目前通用的、由美国加州医学中心提出RLA分期,此方法认为步行时有3个基本任务:承受体重、单腿站立和迈步向前,基本任务中又分为8个时期。步态分期中传统划分与RLA法对应比较。步态参数:步长、跨步长、步宽、步角、步速和步频。步态参数受诸多因素的影响,即使是正常人,由于年龄、性别、身体肥瘦、高矮、行走习惯等不同,个体差异较大,因此正常值比较难以确定。
关节活动度(rangeofmotion,ROM)是指关节活动时可达到的比较大弧度,是衡量一个关节运动量的尺度,常以度数表示,是肢体运动功能检查的**基本内容之一。根据关节运动的动力来源可将关节活动度分为主动关节活动度和被动关节活动度。1.主动关节活动度(activerangeofmotion,AROM)AROM是人体自身的主动随意运动而产生的运动弧。测量某一关节的AROM实际上是评定受检者肌肉收缩力量对关节活动度的影响。2.被动关节活动度(passiverangeofmotion,PROM)PROM是通过外力如治疗师的帮助而产生的运动弧。正常情况下,被动运动至终末时会产生一种关节囊内的、不受随意运动控制的运动,因此,PROM略大于AROM。通过步态分析系统(如Novel、RSscan等品牌)检测压力分布,生成热力图,识别异常区域(如前足过度负荷)。
常因股四头肌痉挛导致膝关节屈曲困难、小腿三头肌痉挛导致足下垂、胫后肌痉挛导致足内翻,多数偏瘫患者摆动相时骨盆代偿性抬高,髋关节外展外旋,患侧下肢向外侧划弧迈步,称为“划圈”步态。在支撑相,由于痉挛性足下垂限制胫骨前向运动,往往采用膝过伸的姿态代偿;同时由于患肢的支撑力降低,患者一般通过缩短患肢的支撑时间来代偿。部分患者还会出现侧身,健腿在前,患腿在后,患足在地面拖行的步态。如果损伤平面在L3以下,患者有可能**步行,但因小腿三头肌和胫前肌瘫痪,表现为跨槛步态。足落地时缺乏踝关节控制,所以膝关节和踝关节的稳定性降低,患者通常采用膝过伸的姿态以增加膝关节和踝关节的稳定性。L3以上平面损伤的步态变化很大,与损伤程度有关。3D打印定制化鞋垫根据个体足压数据,通过3D打印制造个性化矫形鞋垫,材料具备自适应缓冲性能如TPU弹性体。步态足底压力科研
压力+肌电+运动捕捉结合足底压力与表面肌电图、惯性传感器数据,评估下肢生物力学。点阵式足底压力矫正
正常步态时,足跟着地时地反力向后方,因为惯性力使得髋关节屈曲和屈曲,这时候需要臀大肌进行支撑维持。而当出现臀大肌无力时,脚跟触地时,重心落在髋关节后方,躯干会向后倾倒,为了使髋关节稳定,因此就会出现前后摇摆的姿势。一般锻炼大腿、后腰的方法都会锻炼到臀大肌,而且通过部分动作调整,锻炼的重心会向臀大肌倾斜,因此锻炼时根据不同锻炼要求关注细节调整。在专业人员的指导下,经过一段时间的训练,肌肉可以恢复正常的状态。点阵式足底压力矫正
足底疾病多由压力失衡、劳损、***引发,做好防护可有效降低发病风险。针对足底筋膜炎,避免长期负重和剧...
【详情】