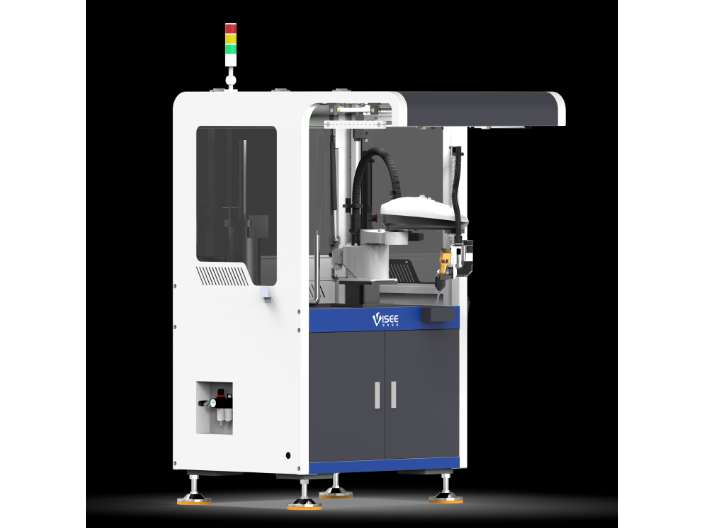
- 品牌
- VISEE,慧炬
- 型号
- G300
- 类型
- 在线跟随点胶机
- X轴行程
- 450
- Y轴行程
- 380
- Z轴行程
- 200
- 最大负载
- 6
- 移动速度
- 1000
- 重复精度
- ±0.02
- 存储空间
- 128
- 气源
- 0.5-0.7
- 电源
- 220/50
- 功率
- 1500
- 最小吐出量
- 0.1
- 吐出时间调节
- 0.01
- 吐出频率
- 100
- 外形尺寸
- 1100*1400*1800
- 重量
- 500
- 产地
- 广州
- 厂家
- 慧炬智能
胶水气泡是影响点胶质量的常见问题,点胶机的防气泡技术已形成完整解决方案。设备的供胶系统配备真空脱泡装置,在胶水输送过程中进行 - 0.09MPa 的真空处理,脱泡效率达 99%,特别适合环氧树脂、硅胶等易产生气泡的胶水。在点胶针头设计上,采用防虹吸结构,避免胶水回吸时带入空气,胶点的气泡率控制在 0.5% 以下。对于高粘度胶水,点胶机通过脉冲式点胶方式,利用压力变化将胶水中的微小气泡释放,在 LED 封装中,使胶层的气泡直径不超过 0.01mm,确保发光效率不受影响。双工位点胶机交替作业,在汽车传感器引线处涂覆绝缘胶,每小时可处理 800 件产品。山东底部填充点胶机有哪些
点胶机
新能源电池的安全性和一致性要求,推动了点胶机在该领域的创新应用。在锂电池电芯的封装中,点胶机需在极片边缘涂抹绝缘胶,胶宽控制在 0.5mm 以内,确保正负极片不短路,同时胶水需具备耐高温、耐电解液腐蚀的特性。针对电池模组的组装,点胶机采用多头同步点胶技术,多个针头同时对不同电芯进行点胶,生产效率提升 3 倍以上;通过视觉系统识别电芯的极耳位置,精确控制导电胶的点涂位置,保证模组的导电性能。在电池 Pack(包装)环节,点胶机沿着电池壳体的密封槽涂抹结构胶,胶型需连续均匀,固化后形成防水、防震的保护层,满足电动汽车对电池的严苛使用环境要求。福建选择性点胶机选型多头点胶机同步作业,在玩具按键矩阵处同时点胶,生产效率较单头机提升 5 倍。

人机协作模式的引入,使点胶机在柔性生产中更具适应性。协作式点胶机器人配备力觉传感器,当与操作人员发生接触时,能在 0.1 秒内停止运动,接触力不超过 50N,确保人员安全。在小型电子产品的返修点胶中,工人可手持工件在机器人工作范围内自由移动,机器人通过视觉跟踪实时调整点胶位置,实现 “人动机器随” 的灵活作业模式,返修效率提升 50%。设备的安全防护系统还包括红外感应区域,当人员进入危险区域时自动降低运行速度,离开后恢复正常速度,兼顾了生产效率与操作安全。
点胶机的工作原理基于流体控制与机械运动的准确配合。首先,胶水等流体材料被存储在针筒或压力桶中,通过气压、螺杆推送或活塞挤压等方式产生动力,将材料输送至点胶针头。同时,控制系统根据预设程序,驱动机械臂或工作台按照设定路径移动,使针头在产品指定位置完成点胶动作。在这一过程中,胶量的控制至关重要,通常通过调节压力大小、点胶时间、针头直径等参数实现。例如,对于微小电子元件的点胶,需将胶量控制在纳升级别,此时设备会通过高精度压力传感器与伺服电机的联动,确保每一滴胶水的体积误差不超过 ±5%,从而满足精密制造的需求。视觉定位点胶机识别 PCB 板上的微小焊盘,自动调整点胶头角度,确保芯片封装胶层平整。
点胶机的未来发展正迈向仿生点胶与自适应控制的新阶段。仿生点胶技术借鉴生物分泌液体的原理,开发出类似昆虫口器的柔性点胶头,能根据工件表面的微观形貌自动调整形状,在粗糙表面也能形成均匀的胶层,粘接强度提升 30%。自适应控制系统通过机器学习,能识别不同批次工件的细微差异,如尺寸偏差、表面粗糙度变化等,实时调整点胶参数,使产品的一致性不受原材料波动影响。未来的点胶机还将集成更多传感器,如红外温度传感器、湿度传感器等,实现对环境因素的动态补偿,在复杂工况下仍保持稳定的点胶质量,为智能制造提供更强大的工艺支撑。高速喷射点胶机在 PCB 板阻焊层开窗处点胶,每小时处理 5000 片,胶点圆度>90%。北京压电阀点胶机公司
视觉点胶机识别 LED 显示屏灯珠位置,自动校准点胶坐标,确保每个灯珠胶量一致。山东底部填充点胶机有哪些
智能穿戴设备的小型化趋势,推动了微型点胶技术的发展。在智能手表的表盘贴合中,点胶机沿着 0.5mm 宽的边框点涂 UV 胶,胶线宽度 0.15mm,且连续无断点,确保表盘的防水等级达到 IP68 标准。针对蓝牙耳机的电池固定,点胶机采用微型针头(直径 0.1mm)点涂热熔胶,胶点体积控制在 0.001ml,既保证电池牢固固定,又减轻设备重量。在柔性手环的生产中,点胶机使用低模量胶水,通过蛇形轨迹点胶,使胶层具备一定的拉伸性能,适应手环的弯曲变形,同时保持良好的粘接强度。山东底部填充点胶机有哪些
- 湖北动态点胶机成交 2026-05-09
- 广东双阀点胶机推荐 2026-05-09
- 浙江电路板点胶机有哪些 2026-05-09
- 湖北全景视觉点胶机销售厂家 2026-05-09
- 华南视觉点胶机品牌 2026-04-29
- 河北精密点胶机品牌 2026-04-29