一次随机测试在特定频带上产生多个频率,而正弦扫频测试只产生一个频率,并且该频率预先设置的范围内扫描。利用信号的反馈调节输出幅值,使UUT的响应幅值与测试目标谱相匹配。测试目标谱是幅值(通常定义为峰值加速度)与频率的关系图。RSD、RSTD,是正弦扫频测试的扩展。正弦扫频过程包括产生一个正弦波输出,在测试中激励待测设备,检测信号输入幅值,将检测到的与参考幅值进行比较,并适当地更新驱动信号幅值。为了测量输入信号的水平,探测器可以使用滤波器,或者可以测量信号的RMS、峰值或平均值。当使用滤波器时,会产生振幅和相位数据,而其他测量方法只产生幅值数据。如果使用多个通道,则每个检测器的输出在通道平均块中进行组合。滤波器**降低了正弦驱动频率上下的噪声和谐波信号。他们的中心频率总是调整到当前的驱动频率,使得其他信号不被测量和。滤波器带宽可以是固定的,也可以是与当前频率成比例的。基于当前中心频率和带宽,晶钻仪器的Spider振动测试系统不断更新滤波系数。它有一个约为-60分贝。滤波器的输出被平均以产生一个幅值,然后由比较器用来校正输出驱动幅值。 透平叶片振动应力疲劳测试。浙江单轴控制方法
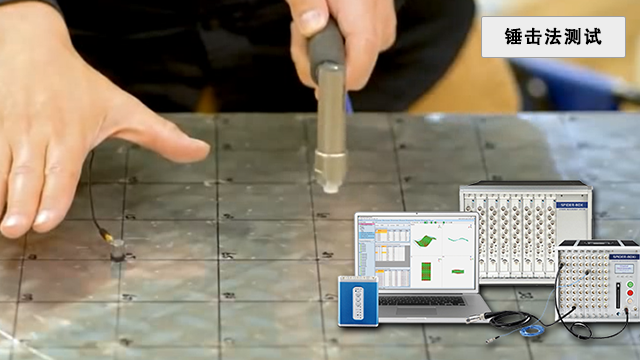
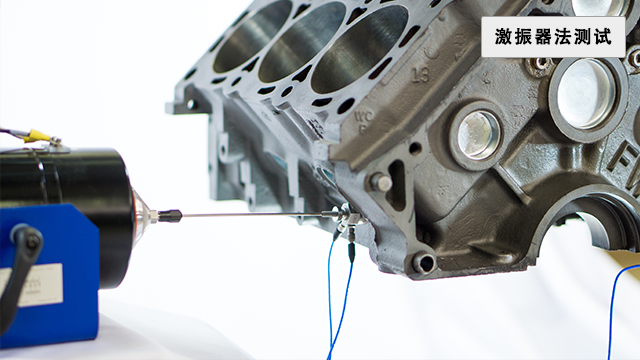
动态信号分析仪的一个常见应用是测量机械系统的频率响应函数(FRF)。这也称为网络分析,系统的输入和输出同时测量。通过这些多通道测量,分析仪可以测量系统如何“改变”输入。一个常见的假设是,如果系统是线性的,那么这个“变化”被频率响应函数(FRF)充分描述。事实上,对于线性和稳定的系统,只要知道频率响应函数,就可以预测系统对任何输入的响应。宽带随机、正弦、阶跃或瞬态信号在测试和测量应用中被***地用作激励信号。图1说明了一个激励信号x,可以应用于一个UUT(测试单元),并生成一个或多个由y表示的响应,输入和输出之间的关系称为传递函数或频率响应函数,由H(y,x)表示。一般来说,传递函数是一个复杂的函数,描述系统如何将输入信号的大小和相位作为激励频率的函数。湖南振动台控制仪瞬态随机输出一个随机冲击信号来模拟真实自然环境的冲击。
远程设备状态监测(RCM)是为远程监控在本地网络中无法配置的设备或结构而设计的。远程状态监测的常见应用和实例包括监测设备运输期间的振动,监测靠近轨道或道路的桥梁和结构上的振动,以及监测由地面上的旋转风车引起的振动。EDM–RCM扩展动态信号分析(DSA)的功能。这些功能与Spider平台集成从而能够对远程仪器和设备进行可靠的监测。通过使用蜂窝数据连接的移动无线网关,EDM–RCM可以远程连接由多台Spider组成的包含任意通道个数的Spider系统。EDM–RCM软件可以通过一个静态公共IP地址访问每一个Spider系统。利用无线移动网关提供的静态公共IP地址可确保全球范围内的远程连接。EDM–RCM软件通过独特的设计,除了为世界各地的Spider前端提供必要数据的***结果外,还可以同时连接多个此类Spider系统。该软件可以根据需要提供来自任何Spider系统的实时数据视图,也可以从任意Spider前端下载记录文件以供进一步分析和推断。
机械系统的许多特性在频域中可以以对数方式更好地描述。在振动测试系统中,FFT提供的均匀频率分辨率并不理想,因为高频范围内已经足够分辨率,在低频范围内可能不够,并且性能也会受到影响。例如,许多流行的随机测试标准要求在低频范围内具有高达2kHz的高分辨率。为了满足要求,必须使用高频不需要的高分辨率(大blocksize)。因此,在高频范围内,循环时间和存储空间会增加,并且频谱刷新率会降低为了提高低频范围内的性能并保持合理的环路时间,在整个振动过程中应对低频和高频范围应用不同的分辨率。锐达的EDM提供多分辨率功能,可在高频范围内应用所选分辨率,在低频范围内应用8倍分辨率。由软件计算的截止频率分隔了低频和高频范围。用户也可以选择几个相邻频率以避免系统共振或**振。 多分辨率,提高低频范围的性能,保持合理的循环时间。
Spider-80SG是建立在IEEE1588上的时间同步技术。在同一个网络下,Spider前端可以达到50ns精度同步,保证相邻道相位匹配为±1^°@20kHz。这样独特的技术和高速以太网数据传输,使得网络连接的分布式组件如一个集成系统。LOCALSENSING功能作为验证精度的一部分,Spider-80SG采用晶钻仪器的localsensing功能可以校准测试。localsensing验证设备实际测量的精度,而设备的精度在出厂前已被调置。泊松比参数泊松比作为Spider-80SG系统的一个测量参数。用户将可以自定义一个泊松比的值,或直接根据测试或测试配置来设置。兼容测量量和推荐传感器Spider-80SG支持各种测量量的多种传感器。以下列表概括了一些支持测量量的传感器,现实中兼容的传感器绝不仅限于列表所包含的。加速度传感器–Dytran7603B,7503,7523A2,Endevco7264C,KistlerType8395A,DTS6DXPROseries力传感器–OmegaLCM901,FutekFFP350扭矩传感器–OmegaTQ-130Series,FutekTDD400,FutekTRS300,FutekTAT200,TAT420压力传感器–OmegaPX309series,MeasurementSpecEB100,FutekPMP927角速度传感器–DTSARSPro-300,ARSPro-1500,ARSPro-8K,ARSPro-18k位移传感器–OmegaE2E-3DCSeries。 疲劳损伤频谱,(FDS)。贵州随机控制设备
院使用CoCo80振动测试巡检仪对GIS进行振动检测与报告分析。浙江单轴控制方法
数值信号显示不能直观表示被测结构振动强度和分布。结构的变形动画可以让用户清晰直观地观察到结构的振动强度。它利用彩色图颜色的深浅图形化显示振动的大小,帮助用户找到测试单元振动强度的**大处和**小处。这需要先构建被测结构的三维几何模型。然而由于测试件在x、y、z坐标上尺寸和几何的复杂性,创建测试件的三维模型往往具有挑战性。晶钻仪器公司开发的振动可视化功能,只需要简单的几个步骤就可以生成任何复杂结构的三维几何模型,而且可以显示结构的变形动画。这让被测结构在振动测试过程中的振动强度可视化。 浙江单轴控制方法