无论是在同一个Spider前端还是在不同的前端,精确的时间同步使得所有通道之间的频域相位匹配非常好。在不同的Spider前端之间,通道相位匹配为(在20kHz范围内),适用于需要跨通道测量的高质量结构和声学应用。除了需要一个以上输出源的MIMO振动和MIMO模态测试外,Spider-80M还具有强大灵活的数据采集功能。连续时间数据记录和频谱分析可以由许多条件发起,包括用户操作、预置运行计划、报警限制触发器、输入触发器或数字输入触发器。具备一个高性能的,默认容量250GB(记录时,数据将以NTFS文件格式写入)。使用PC端软件可将数据从硬盘中传输到PC。CoCo-80X动态信号分析/数据记录仪进行声学测试。广东振动控制仪
路谱(TWR)的目标谱编辑:任何采样率的波形都可以进行数字重采样、缩放、滤波,并且可以使用EDM-波形编辑器通过不同的补偿技术来编辑目标谱。还提供了裁剪、追加和插入波形部分的选项。波形编辑器是一种修改时域波形的工具,用以适应振动台的再现要求。它可以拼接、裁剪、滤波,并对加速度、速度和位移波形进行补偿。它不同于后分析应用程序,因为它不做FFTs或任何其他形式的分析。该功能属于EDM振动噪声测试系统VCS的一部分。通用选项:谱线数用于频谱分析,设置谱线数。线数越高,越增加频域数据的分辨率。Bin数值设置直方图数据的分辨率。目标谱数量将量纲设置为加速度、速度、位移或电压。撤消比较大步骤设置撤消命令的缓存操作数开始平均数设置平均的开始帧。西安64通道控制器正弦genzhong滤波提供了一个正弦扫频测试振动系统中扩展测试通道数的解决方案。

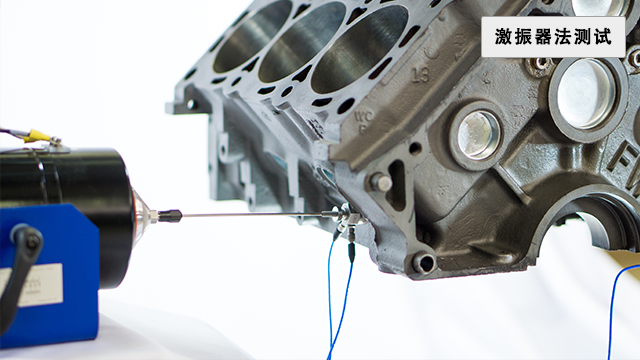
FDS功能能够提供一种方法,通过计算**快的破坏或破坏路径来减少试验时间。根据FDS的计算,将随机或扫频正弦的能量集中到它将引起**疲劳损伤的地方,加速了测试时间。简而言之,FDS让用户了解何种振动频谱会对对象造成更大的损害,并使用该信息和其他参数(比如峰态)来减少测试时间。利用Spider-80X多通道数据采集仪(或Spider-81振动台仪)采集数据,并通过EDM随机测试功能生成疲劳损伤谱。FDS函数利用S-N曲线构建频谱分析图。S-N曲线表示对材料(S)施加的应力和应用应力(N)的循环次数。通过频谱分析图我们可以实现随机振动疲劳分析。
CoCo-80X能够准确地测量和记录动态和静态信号。SD卡同时记录和存储8个通道的数据,这些数据在执行实时频率和时间域计算时达。嵌入式信号源的通道提供了多个与输入采样率同步标准波形。在数据采集过程中转速表可以测量转速。信号源和转速表共用一个LEMO连接器。内置WIFI功能,PC链接设备后,通过CoCoEDM软件直接下载采集的数据。CAN总线(ISO11898-1&2)的数字输入允许同步测量汽车的速度,发动机转速和/或任意的数百种性能变量通过其区域网络(CAN)。只需简单的将汽车的SAEJ1962依次的插入汽车的车载诊断(OBDII)连接器就可以添加额外的时间信号到您的量程里了。内置GPS功能,记录汽车行驶轨迹。 使用振动测试仪Spider-80X对高精度磨床主轴振动故障排除。

动态测量功能Spider-80Xi执行许多动态信号分析功能,包括数据记录,(+,-,*,/)等算数运算,积分,微分,加窗函数,FFT谱,平均值,功率谱,互谱,传递函数FRF,相干分析,实时过滤,RMS,正弦扫频,极限值,警报/终止等。黑盒工作模式Spider-80Xi能使用黑盒模式,它容许脱离PC进行数据采集操作。在这个模式下,PC电脑只用于测试前配置系统,然后在测试完成后下载数据。测试期间,前端可按照预先设定的时间表或各种外部设备如使用Wi-FI的PDA或IPad操作。实时信号分析功能◎数学运算(+、-、*、/)、积分/微分、RMS、峰值、平均、概率统计。◎加窗、FFT、ZoomFFT、自功谱/互功谱、频率响应FRF,相干、自相关。◎实时滤波器:抽点、IIR、FIR、FIR-Remez、FIR-Window◎倍频程分析、阶次、阈值报警等◎单双面动平衡。 CoCo-80X动态信号分析/数据记录仪。吉林随机控制供应商
Spider-80Xi,32多通道网络化系统。广东振动控制仪
实时数字滤波器用来实时地过滤被测量的信号,用户可以自定义;滤波器特性以满足特殊的应用的需求。实时数字滤波器应用于数据调节阶段。数字滤波器模式选择是通过图形化的设计工具来进行设置的,然后上传到设备以供实时计算。在这个图形化设计工具中,滤波器纵轴以dB为单位,横轴为相应频率。例如,用户可能需要查看一个特定频率带宽内的能量分布,而不是整个频谱。这可以通过创建带通滤波器然后将RMS算子应用于滤波器的输出来完成。下图显示了用于在EDM软件中定义实时过滤器的流程图。左侧的图标CH1表示需要被测量的原始时域信号。它连接到一个IIR滤波器,IIR滤波器计算一个名为iirfilter(ch1)的信号,该信号再连接到RMS算子。RMS算子的输出rms(iirfilter(ch1))的信号。 广东振动控制仪