- 品牌
- 威睿晶科
- 型号
- J5R
- 加工定制
- 是
- 精确度
- 1~5cm
- 工作温度
- -10~50(典型值)
- 峰值波长
- 905
- 工作电压
- DC 9~36(典型值)
- 是否进口
- 是
- 厂家
- 深圳市威睿晶科电子有限公司
- 产地
- 广东,深圳,北京,上海,浙江,湖北
- 量程(m)90%目标发射
- 0.1~30
- 扫描范围
- 270°
- 测量频率(khz)
- 10~50
本文将深入解析激光雷达在AGV环境感知与定位中的关键技术。环境感知能力激光雷达通过发射激光束并接收反射回来的信号,能够精确获取周围环境中物体的距离和形状信息。这种能力使得AGV能够实时、准确地感知其周围环境,为后续的定位和导航提供关键数据。定位精度与稳定性激光雷达在AGV定位中的应用可以实现高度精确的定位能力。通过扫描周围环境并获取地面或墙壁等参考点的位置信息,激光雷达能够对AGV进行准确的定位。与传统的里程计方法相比,这种定位方法更加稳定可靠,不受轮胎滑移或地面摩擦力变化的影响。障碍物检测与避障在运行过程中,AGV需要及时检测到障碍物并做出相应的避让动作。激光雷达能够快速、准确地探测到周围障碍物的位置和距离,为AGV提供关键的避障信息。同时,激光雷达在多个方向上的扫描能力使其能够覆盖多个区域,从而实现四周的障碍物检测,进一步增强了AGV的避障能力。地图构建与路径规划激光雷达可用于构建环境地图,为AGV提供准确的运行环境信息。通过扫描周围的物体和结构,激光雷达可以生成三维点云数据,从而实现环境的高精度建模。这为AGV的路径规划提供了基础数据,使其能够根据地图信息规划出准确的行驶路径,提高运行效率。激光雷达在AGV领域的应用可以有效降低人工干预和错误率,提高自动化程度和作业安全性。二维激光雷达避障
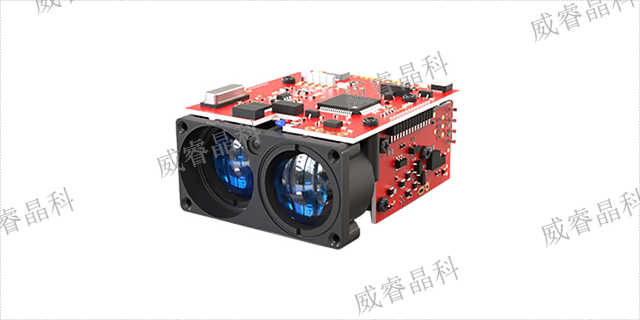
激光雷达
激光雷达是一种通过发射和接收激光束来测量目标距离、速度、形状等信息的传感器。它通常被用于自动驾驶、机器人导航、三维建模等领域。激光雷达的工作原理是向目标发射激光束,然后通过测量激光束反射回来的时间或相位差,来计算目标的距离和位置。由于激光具有高方向性、高单色性和高相干性等特点,因此激光雷达能够实现高精度、高分辨率的测量。激光雷达的优点包括测量精度高、抗干扰能力强、能够快速获取大量数据等。不过,它的成本相对较高,并且在恶劣天气条件下(如雾、雨、雪等)的性能可能会受到影响。威睿晶科激光雷达原理激光雷达的发展也促进了相关领域的研究,如图像处理、人工智能和大数据分析等。

激光雷达为送餐机器人提供一个新方案:本文将探讨其如何提升智能餐饮服务的效率和质量。在当今社会,人工智能与机器人的发展日新月异,其中,服务机器人已经成为许多领域的重要组成部分。在服务机器人领域中,送餐机器人是常见的一种。它们在酒店、写字楼、商场等复杂环境中提供各种服务,如房间送餐、迎宾带路和信息宣传等。而激光雷达便是解决如何提高这些机器人的效率和精度。激光雷达,也称为光学雷达,是一种利用激光束进行测距和导航的雷达系统。激光雷达通过发射激光并接收反射回来的信号,能够精确测量出机器人与目标物体之间的距离和角度,从而构建出周围环境的详细地图。在此基础上,机器人可以确定行走道路,实现准确导航。在送餐机器人的应用中,搭载了激光雷达的送餐机器人。这款机器人在厨房、客房和电梯等复杂环境中表现出色。它能够精确地测量出与障碍物之间的距离,并自动规划出合适的送餐路线。此外,机器人还能根据菜品的类型和位置做出相应的处理,例如将热菜和冷菜分别送到不同的房间,或者在遇到人或宠物时自动避让。
完美配合:机器视觉与激光雷达的联合应用案例分析。在机器人和自动化领域,机器视觉和激光雷达一直是研究的热点。这两种技术各有优势,但也存在一定的局限性。然而,当它们结合起来时,它们可以相互补充,实现更加高效和精确的应用。在本文中,我们将介绍一个机器视觉与激光雷达完美配合的应用案例。机器视觉是一种基于图像处理和计算机视觉的技术,具有获取信息量大、处理速度快等优点。然而,机器视觉在处理复杂环境中的动态物体时存在一定的困难。相比之下,激光雷达通过发射激光束并接收反射回来的信号来测量目标物体的距离和方位角,具有较强的抗干扰能力和适应复杂环境的能力。在本次应用案例中,机器视觉和激光雷达的联合使用实现了无人驾驶车辆的精确导航和避障。无人驾驶车辆搭载了激光雷达和高清摄像头,其中激光雷达负责测量车辆周围障碍物的距离和方位角,高清摄像头则负责获取道路标志、交通信号等信息。通过机器视觉和激光雷达的配合,无人驾驶车辆能够在复杂的城市环境中实现精确导航和避障,有效提高了车辆的行驶效率和安全性。激光雷达技术可以使得 AGV 的导航和建图能力得到大幅提升。
激光雷达在无人叉车中的避障和导航应用。为了实现无人叉车的高效运作和安全性,激光雷达技术被广泛应用于其避障和导航系统中。本文将探讨激光雷达在无人叉车中的具体应用,并介绍其专业性描述。激光雷达在无人叉车中的避障应用方面发挥着重要作用。通过发射激光束并接收反射回来的光,激光雷达能够快速、准确地感知周围环境,包括物体的位置、形状和距离。这种高精确性的数据为无人叉车提供了实时的障碍物检测功能,使其能够避免与障碍物的碰撞。激光雷达在无人叉车的导航系统中也扮演着重要角色。通过对仓库或工厂内部环境进行扫描和建模,激光雷达可以生成高精度的地图。这些地图不仅包括墙壁和障碍物的位置,还可以标识出货架、货物堆放区域等重要目标。基于这些地图,无人叉车可以根据实时感知到的位置信息,准确计算出合适路径,并自主导航到指定位置。在无人叉车系统中,激光雷达通常与其他传感器(如摄像头、超声波传感器等)进行整合。通过多个传感器的协同工作,无人叉车能够更准确地感知周围环境,并做出更可靠的决策。例如,当激光雷达探测到一个障碍物时,摄像头可以用来进一步识别和分类该障碍物,从而更好地规划避障路径。有了激光雷达,扫地机器人的清洁效率提高,真是神奇的技术!二维激光雷达避障
未来的激光雷达可能会更加智能化,能够自动学习和适应不同的环境,提高系统的鲁棒性和可靠性。二维激光雷达避障
工业机器人视觉指引者:激光雷达技术揭秘。本文将揭秘激光雷达技术在工业机器人视觉中的应用和突破。首先,激光雷达技术具备高精度和远距离探测的特点,为工业机器人提供了准确的环境感知能力。通过发射激光束并测量返回时间以及反射点的位置,激光雷达能够实时获取周围环境的三维数据。这使得机器人能够清晰地识别并定位目标,从而实现精确的操作。无论是在装配、焊接、喷涂还是物料处理等领域,激光雷达技术都能帮助机器人准确定位,并实现高精度的操作。其次,激光雷达技术在工业机器人的视觉导航中发挥了重要作用。机器人需要能够自主导航,准确感知环境并规划路径,以实现高效的移动和操作。激光雷达通过扫描周围环境,并根据返回的激光束信息生成精确的地图。借助这些数据,机器人可以实时调整路径,避开障碍物,并快速准确地到达目标位置。激光雷达所提供的高精度和实时性,为机器人的导航提供了可靠的支持,提高了工业机器人的运行效率和安全性。在生产线上,机器人需要对产品进行精确的测量和检测,以确保产品质量符合标准。激光雷达通过测量物体表面的距离和形状,可以实现精确的三维测量。借助这些数据,机器人可以识别出产品表面的缺陷、尺寸偏差等问题。二维激光雷达避障
- 激光雷达商家 2024-11-24
- 国内激光雷达精度 2024-11-24
- 三维激光雷达避障 2024-11-23
- 无人机激光雷达 2024-11-23
- 三维激光雷达咨询报价 2024-11-23
- 毫米波激光雷达哪里有卖 2024-11-23