AGV自动充电流程j介绍:
1.电量监测:AGV小车在电量不足时,会向中控系统发出充电请求。
2.导航至充电区:中控系统接收到充电请求后,会下发充电指令给AGV小车,并告知其充电桩的位置,AGV小车根据位置信息导航至充电区域 。
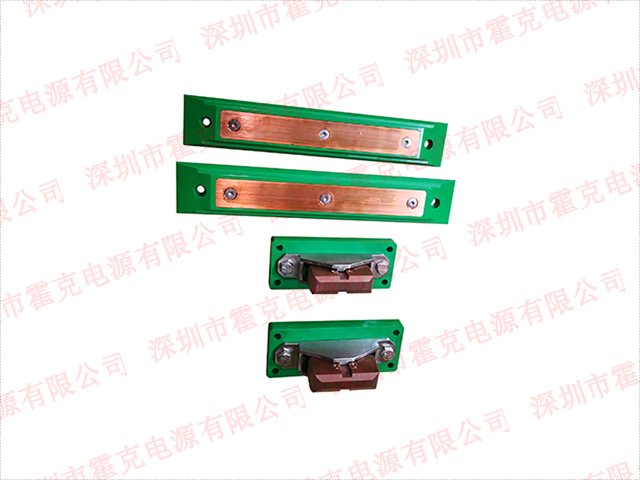
3.自动对接:AGV小车到达充电区域后,自动与充电桩的充电触头进行对接。一些AGV充电桩设计有可伸缩型机构,能够在钟秧控制模块的控制下,带动充电触头与AGV小车的充电电极进行对接
4.开始充电:对接完成后,AGV小车打开充电回路,中控系统通知充电桩开始充电
5.充电监控:在充电过程中,充电监测模块会实时监测充电电压、电流、充电器温度等信息,确保充电安全。
6.充电异常处理:如果出现异常情况,如过流、过压、过温等,充电监测模块会及时上报给中控系统,并发出警报,同时充电桩会断开充电回路,避免意外事故的发生 。
7.充电完成:电池充满后,AGV小车会断开充电回路,充电桩收回充电触头,AGV小车驶向工作区准备下一次任务。
此外,还有手动充电和电池更换充电模式。手动充电需要专职人员手动完成AGV与充电器之间的电器连接,而电池更换充电模式则是提前备好电池,由工作人员在AGV电力不足时更换电池组. 充电模式:锂电池充电器通常具备恒流恒压充电模式,包括预充电过程、恒定电压充电过程、自动再充电过程等。机器人充电机怎么选

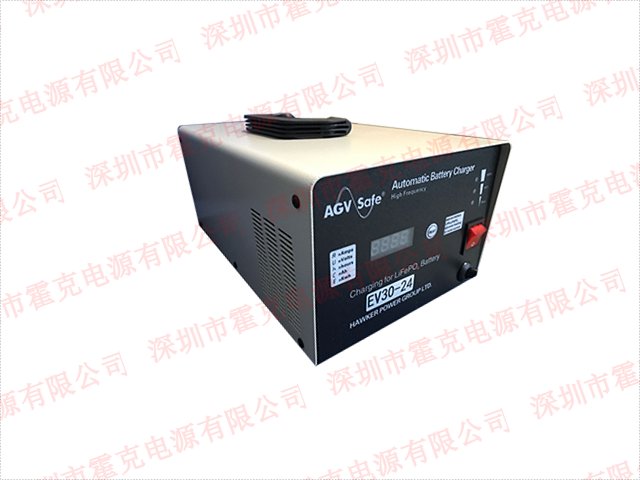
霍克充电机
充电控制器内置默认的充电曲线,内置多种 BMS 充电通讯协议。也可以根据用户需要,出厂设置并存储定制的充电曲线,满足定制的充电工艺要求。充电机控制器具有简单、实用的人机界面。在LCD触摸屏上进行充电参数设置,显示充电过程的各种参数、状态,方便用户实时了解充电过程,充电控制器实时监测充电过程中的各种参数,使充电机具有完善的保护功能实时保护充电过程顺利进行。
霍克充电机具有24V/48V /60V/72V/96V等电压的产品。专为AGV(自动导引车)/AMR(自主移动机器人)应用精心打造的充电解决方案。 地充充电机源头厂家AGV自动充电:对接完成后,AGV小车打开充电回路,中控系统通知充电桩开始充电。

当充电机发生着火时,应采取以下正确处理步骤:
1.立即切断电源:首先应迅速切断充电机的电源,可以拔下电源插头或拉下总闸。
2.使用适当的灭火器:对于可能带电的电器设备,应使用干式灭火器、二氧化碳灭火器或1211灭火器进行灭火,不要使用水来扑灭电器火灾,以避免触电的危险。
3.覆盖窒息法:如果火势较小,可以使用湿棉被或其他非易燃材料覆盖着火的电器,以隔绝空气,达到窒息灭火的效果。
4.保持安全距离:在灭火过程中,应保持安全距离,避免因电器包炸或显像管破裂造成伤害。
5.报警求助:如果火势无法控制,应立即撤离现场,并拨打119报警电话请求专业消防人员前来处理
6.禁止擅自处理:家用电器发生火灾后,未经专业修理,不要接通电源使用,以免发生二次事故或触电。
7.防止二次事故:在处理完火灾后,应检查电器和电路,确保没有其他安全隐患,防止二次事故发生
请记住,安全总是弟一位的,如果对灭火方法不确定,应优先选择撤离并寻求专业帮助。
锂电池充电时,为了确保其安全性和延长使用寿命,需要注意以下几点:
1.避免极端温度环境:不要在高温、暴晒或雨淋环境下充电,也不要在零下温度环境下充电。锂电池怕冷也怕热,锂离子在电解液和电极片中的迁移速率与温度密切相关,适宜的使用温度在5℃-35℃之间
2.使用合适的充电器:请使用原装或品质可靠的充电器,避免使用铅酸充电器或其他不适配的充电器充电时应使用专属锂电充电器,不可使用路边快充。
3.控制充电电流和电压:充电电流一般不超过电池容量的1C(C值是指电池容量的倍数),例如,一块容量为2000mAh的锂电池,适宜的充电电流为2000mA(即2A)。充电电压一般应控制在4.2V左右,避免过高或过低。
4.避免过度充电和放电:锂电池没有记忆效应,不需要充满后再继续充电,也不要将电池放电到过低的23状态。过度充电和放电都会对电池造成损害
5.注意充电时间:掌握好充电时间,充满后及时切断电源,避免过充。同时,也要避免频繁充电
6.检查插头和电池温度:充电过程中,如发现插头或电池温度过高,应立即停止充电,以免损坏电池
7.正确存放电池:长时间不使用的锂电池应该储存在干燥、通风的地方,并尽量保持电池的电量在40%~80%之间。存放时要避免高温、潮湿和极端寒冷的环境。 霍克质量控制:产品经过正规的高低温测试、校准检测、跌撞实验、震动实验、等严格的测试,品质如一。

自动充电流程
在AGV自动充电流程中,从电量监测到对接完成,每一步都精心设计以确保安全与效率。当AGV电量不足时,即向中控系统请求充电,并导航至充电站。充电桩配备灵活触头,利用电动推杆等机制精细移动。AGV抵达后,通过传感器与导引系统微调位置,确保触头精细对接。接触过程中,触头以安全速度靠近并轻触AGV接口,弹性设计适应微小偏差。电气连接一旦建立,即启动充电,同时系统验证连接稳固,确保电流稳定传输。充电期间,实时监测保障安全,遇异常即报警并断电。充电完毕后,触头自动分离并复位,AGV恢复待命。整个过程无需人工干预,不仅提升了充电效率,还大幅增强了作业安全性与自动化水平。该流程是AGV智能物流系统中不可或缺的一环,助力企业实现高效、可靠的无人化运作。 无论是提升充电效率、延长电池寿命,还是优化能源管理,霍克都将全力以赴,助力客户实现更高的发展目标。广西充电机厂家
高频充电机专为机器人量身打造,轻松应对动态多变的工作环境,可无缝融入并高效运行。机器人充电机怎么选
霍克充电机CAN通讯介绍
1.CAN报文结构:CAN报文由ID(标识符)、数据帧等组成,主要关注报文ID、数据内容、发送周期。例如,直流充电网的报文结构包括序号、控制字、数据长度、数据包个数、预留字节、PGN(报文组号)等。
2.通信标准:CAN物理层规定了充电机与BMS之间通信的接口、电气特性和传输速率等要求。推荐使用250kbit/s的传输速率,并且使用符合ISO11898-1:2003标准的屏蔽双绞线接口。
3.CAN帧格式:CAN帧格式由起始位、仲裁域、数据域、控制域和结束位组成。每个CAN帧包含一个PDU(协议数据单元),PDU由优先权、保留位、数据页、PDU格式、PDU特定、源地址和数据域组成。
4.通信流程:充电机与BMS的CAN通信包括充电握手阶段、参数配置阶段、充电阶段和充电结束。在握手阶段,BMS识别接入的是车载充电机还是直流充电桩,以选择对应的通信协议。充电阶段,BMS控制继电器闭合使主回路导通,实现电池组充电。安全监控帧处理确保了充电系统的安全性和可靠性。 机器人充电机怎么选