电池充电器依据不同分类如下:
1.按连接方式:充电器可区分为插墙式和桌面式两种,分别适应不同的安装与使用环境。
2.按电池类型:针对不同类型的电池,充电器亦有细分,如镍镉、镍氢、铅酸及锂电池充电器等,确保精细匹配,安全充电。
3.按功能:充电器分为砖用型和通用型,前者专为特定电池设计,后者则具备更犷范的适用性。按充电控制方式:为防止电池过充,充电器采用多种控制策略,包括峰值电压控制、dT/dt控制、温度控制、电压下降控制、计时控制及TCO控制等。
4.技术参数分类:根据输入电压、输出电压、电流、功率、效率、温升及绝缘电阻等关键参数,充电器亦可进一步细分。
针对AGV(自动导引车)的充电技术,则呈现出多元化的特点:
换电池充电:适用于对工作效率有极高要求的场景,通过快速更换电池组实现不间断作业。
手动充电:在自动化程度较低的环境中,人工操作连接充电器与AGV进行充电。
自动充电:分为在线与离线两种模式,灵活适应不同的工作节奏与需求.
无线充电:无需物理接触,为柔性化布局及特殊工业环境提供了更为便捷的充电解决方案,增强了系统的灵活性与安全性。
每种充电方式均针对特定场景优化,合理选择能够显筑提升AGV的工作效率并延长电池使用寿命。 无线充电:无需物理接触,为柔性化布局及特殊工业提供便捷的充电解决方案。广西充电机说明书

霍克充电机对电池加热的几种用法策略:
1.动力电池充电加热回路控制方法:在动力电池电量低且单体温度较低时,先对电池进行加热,待温度达到设定阈值后再进行充电。这种控制方法可以避免因温度过低导致的充电困难和安全问题。加热装置通常包括加热电流测量装置、加热装置、加热熔断器、加热继电器等,加热装置会贴于电池包内部模组的表面。通过电池管理系统(BMS)与充电机通信,调整充电机的输出电压和电流,实现加热和充电状态的切换。
2.脉冲电流加热:在快速加热的场景下,可以使用脉冲电流对电池进行加热。这种方法可以借助大功率双向充电桩实现,提供了车载的大功率脉冲电流源,从而实现电池的快速加热。
3.电阻加热方式:常见的电阻加热方式包括电加热膜和PTC加热。这些加热方式通过电阻发热对电池系统进行加热。PTC加热器的电阻会随自身温度的升高而增大,实现恒温加热效果。
4.低温加热策略:在低温条件下,BMS会根据电池的温度状态来控制加热继电器的闭合,请求充电电压和电流,以实现对电池的加热。当电池温度达到一定值后,再进行正常的充电过程。
广西充电机说明书养成每天使用后充电的习惯,不要等到电池完全放电后再充电,以免缩短电池寿命。
机器人充电机重要指标:
1.**兼容性**:充电机必须与机器人的电气系统兼容,包括电压、电流和连接器类型。
2.**充电效率**:高效的充电机能快速为机器人充满电,减少停机时间。
3.**智能管理**:现代机器人充电机通常具备智能管理系统,能够监控充电状态、电池健康,并在必要时调整充电策略。
4.**安全特性**:具备过充、过放、短路和过热保护等安全特性,确保机器人和充电机的安全。
5.**耐用性**:由于机器人的使用环境可能较为恶劣,充电机需要设计得足够坚固,以抵抗冲击、振动和环境因素。
6.**灵活性**:一些机器人可能需要在移动中充电,因此充电机可能需要具备无线充电或移动充电的能力。
7.**环境适应性**:充电机应能在不同的环境条件下工作,包括温度、湿度和可能的化学腐蚀。
8.**用户界面**:简单直观的用户界面,使操作者能够轻松监控充电状态和进行必要的设置。
9.**维护简便**:设计时应考虑维护的便利性,包括易于更换的部件和简单的故障诊断程序。
10.**扩展性**:随着技术的发展,充电机可能需要升级或扩展功能,设计时应考虑未来的可扩展性。
11.**认证和标准**:遵循相关的行业标准和安全认证,如CE标志、UL认证等。
###锂离子电池充电要求:
1.**使用原装或认证的充电器**:确保充电器符合CCC认证标准,避免使用未经认证的充电器,这可能会损害电池或造成安全风险。
2.**避免过充和过放**:锂离子电池应具备防止过充和过放的安全保护功能。
3.**注意电池温度**:在适宜的温度范围内充电,过高或过低的温度都可能影响电池性能和寿命。
4.**使用合适的充电电流**:充电电流应与电池的充电规格相匹配,避免使用过高或过低的电流充电。
5.**定期检查电池状态**:使用智能充电器可以监控电池状态,并在电池充满后自动停止充电。遵循这些充电要求可以确保电池的安全使用,延长电池的使用寿命,并避免由于不当充电造成的损害。 根据电池容量和充电时间,匹配充电机功率。若充电功率太低,充电时间长;若功率太高,可能造成过度充电。
霍克充电机CAN通讯介绍
1.CAN报文结构:CAN报文由ID(标识符)、数据帧等组成,主要关注报文ID、数据内容、发送周期。例如,直流充电网的报文结构包括序号、控制字、数据长度、数据包个数、预留字节、PGN(报文组号)等。
2.通信标准:CAN物理层规定了充电机与BMS之间通信的接口、电气特性和传输速率等要求。推荐使用250kbit/s的传输速率,并且使用符合ISO11898-1:2003标准的屏蔽双绞线接口。
3.CAN帧格式:CAN帧格式由起始位、仲裁域、数据域、控制域和结束位组成。每个CAN帧包含一个PDU(协议数据单元),PDU由优先权、保留位、数据页、PDU格式、PDU特定、源地址和数据域组成。
4.通信流程:充电机与BMS的CAN通信包括充电握手阶段、参数配置阶段、充电阶段和充电结束。在握手阶段,BMS识别接入的是车载充电机还是直流充电桩,以选择对应的通信协议。充电阶段,BMS控制继电器闭合使主回路导通,实现电池组充电。安全监控帧处理确保了充电系统的安全性和可靠性。 在使用前确保电池已充满电,如果长时间不使用,应每月至少充电一次以维持电池状态。CAN通讯充电机官方
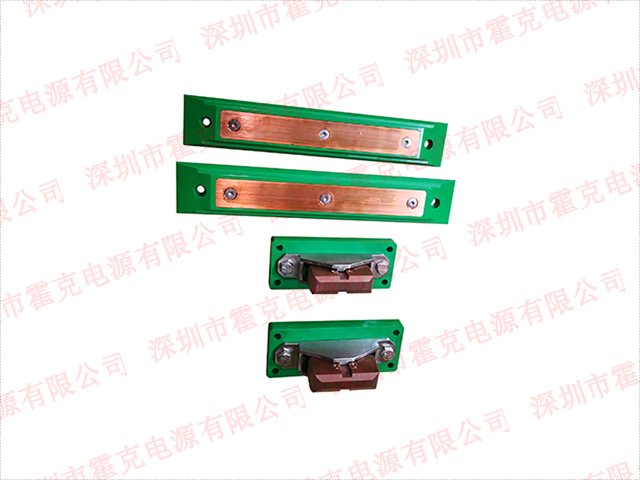
AGV自动充电:AGV小车到达充电区域后,自动与充电桩的充电触头进行对接。广西充电机说明书
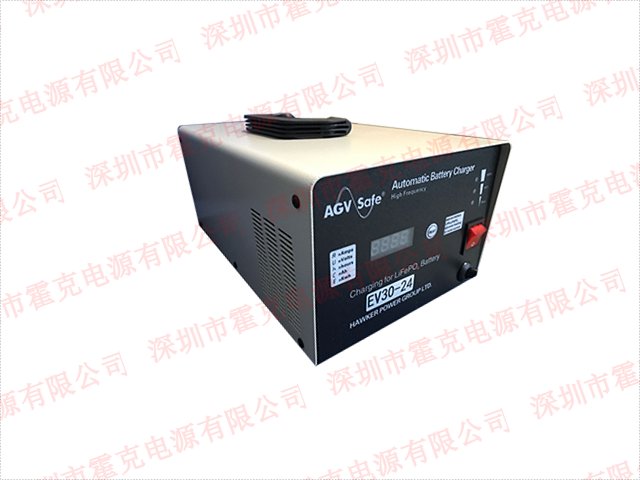
霍克智能充电机是专为AGV(自动导引车)/AMR(自主移动机器人)应用精心打造的充电解决方案,专注于为锂电池提供高效、快速的自动充电服务。
该充电机采用先进的高频开关技术,结合模块化组合结构设计,确保了系统的紧凑性与可扩展性。整体系统精心划分为多个关键单元,包括功率因数校正单元以提升能源利用效率,功率变换单元负责精细控制电能转换,监控单元实时监测充电状态,显示单元直观展示充电信息,电气控制单元确保充电过程的安全与稳定,通讯保护单元则保障数据传输的安全无误,以及充电连接单元实现与AGV/AMR的无缝对接。
霍克智能充电机实现了充电过程的全自动化,无需人工干预,极大地提升了工作效率。同时,其灵活的充电曲线配置功能,能够适配多种类型的锂电池,确保每款电池都能获得蕞优的充电效果,从而延长电池使用寿命,降低维护成本。 广西充电机说明书