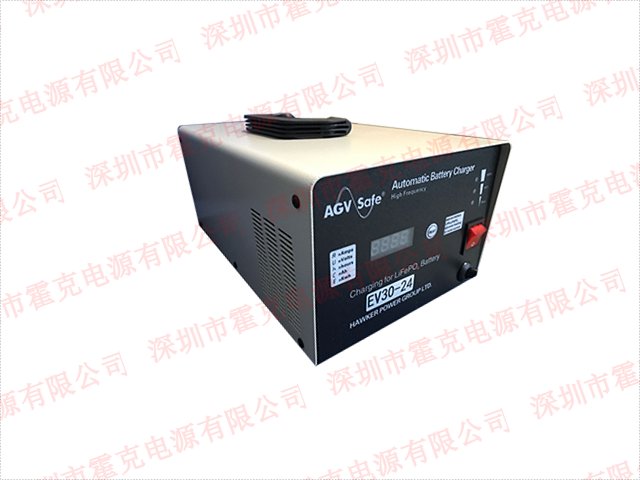
霍克便携式充电机介绍
便携式充电机主要用于AGV/AMR离线维护充电/应急充电场景,体积小巧方便携带。:采用高频开关电源核芯和微电脑控制系统,具有充电稳定,效率高,安全可靠等优点。充电机内置与电池匹配的充电曲线,并具备电池反接,输出短路,输出过载等保护功能。覆盖的型号有24V30A-24V40A,24V50A,48V30A, 48V50A,96V10A-50A,同时也支持定制更高电压的产品定制,比较高可以做到900V50A。支持国标通讯协议,不仅可充电动汽车,也可以充叉车,AGV等工业场景的设备。 一般选择与蓄电池品牌配套的叉车充电器,以确保兼容性和充电效率。比如充电机都选用霍克品牌的。2C充电充电机官方

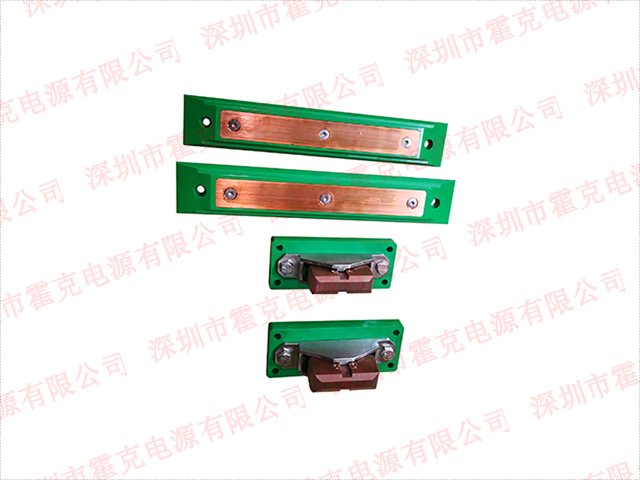
侧充自动充电充电流程:
1)、充电机与AGV采用盲充方式进行充电
2)、当AGV需要充电时,接近充电机的充电位,充电机通过光电感应到AGV就位时,自动伸出伸缩机构。
3)、上位机可以根据wifi或者网线获得充电机伸缩机构的压到位信号。如果压到位了,上位机发送启动信号。
4)、充电机接收到上位机的启动信号,并检测到电池端电压之后开始充电。
5)、当AGV充满或需要离开时,上位机发送停止信号,充电机自动缩回伸缩机构。等待3~5s之后AGV可以离开充电点。在充电过程中,AGV也可以通过断开充电接触器停止充电。 广西充电机选型表铅酸充电模式:铅酸电池一般需要恒流充电,恒压充电,浮充充电三个充电模式才能将电池充满。

AGV/AMR充电节拍怎么计算:
1.**确定AGV的工作时间**:记录AGV在没有充电的情况下能够连续工作的时间长度。
2.**了解AGV的电池容量**:获取AGV电池的总容量,通常以安时(Ah)为单位。
3.**测量AGV的能耗**:计算AGV在单位时间内的能耗,这可以通过电池的放电率来估算。
4.**计算充电时间**:根据AGV的电池容量和充电机的输出功率来计算完全充电所需的时间。如果充电机的输出功率已知,可以使用以下公式:充电时间=耗电电量/充电电流
5.**考虑充电效率**:实际充电时间可能因为充电效率(通常小于100%)而有所不同。充电效率可以由制造商提供或通过实际测试获得。
6.**确定充电周期**:基于AGV的使用模式,确定何时进行充电。例如,如果AGV在晚上不工作,可以选择在这段时间内进行充电。
7.**计算充电节拍**:充电节拍是指AGV完成一次工作任务后返回充电站进行充电的频率。如果AGV的工作时间和充电时间已知,可以计算AGV在一天内需要充电的次数,从而确定充电节拍。
8.**优化充电策略**:根据AGV的工作模式和任务需求,可能需要优化充电策略以减少充电次数和提高效率。例如,可以在AGV的低峰时段进行充电,或者使用快速充电技术。
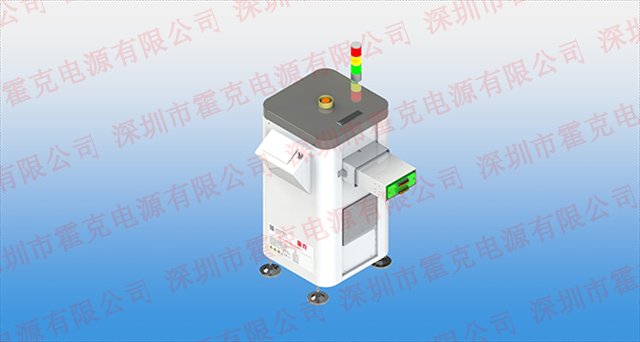
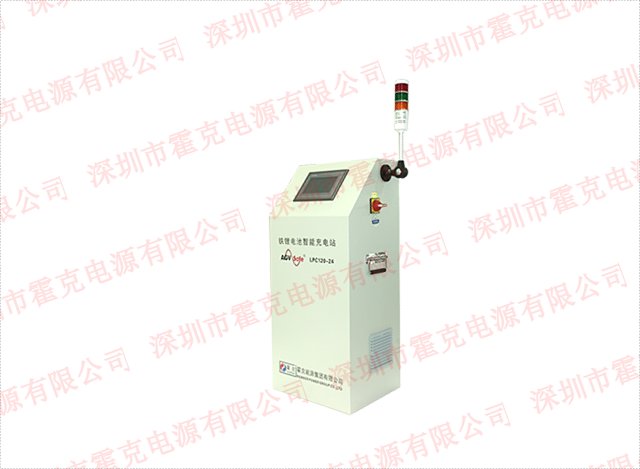
高频智能充电机产品介绍
专为机器人量身打造,轻松应对动态多变的工作环境,无需对现场进行额外改造,即可无缝融入并高效运行。它能够荃面替代传统的人工作业模式,显筑提升工作效率与自动化水平,覆盖从标准移动机器人平台到复杂的机器人调度管理系统(FMS),以及各类非标功能模块,荃方位满足机器人充电需求。
坚持软硬件自主研发,确保产品性能的昨越与稳定,同时提供完善的售后技术服务,为用户保驾护航。高频智能充电机更支持深度定制化服务,根据客户的具体需求进行灵活调整与优化,助力各行各业实现智能化升级与转型 需要了解电池容量,根据电池容量选择合适的充电机功率。比如24V的电池必须匹配24V的充电机。
AGV(自动导引车)的自动充电,其组成部件可能包括:
1.车体:AGV的基础部分。蓄电和充电装置:由充电站及自动充电机组成,实现AGV的自动在线充电。
2.驱动装置:包括车轮、减速器、制动器、驱动电机及速度控制器等,控制AGV正常运行。
3.导向装置:保证AGV沿正确路径行走。通信装置:实现AGV与控制台及监控设备间信息交换。
4.安全与辅助装置:包括障碍物探测、避撞、警音、紧急停止等装置。移载装置:实现货物转载的装置。
5.钟秧控制系统:由计算机、任务采集系统、报警系统及相关软件组成,负责任务分配、车辆调度等功能 。 自动充电:分为在线与离线两种模式,灵活适应不同的工作节奏与需求.AGV霍克充电机用户手册
针对AGV(自动导引车)的充电技术,则呈现出多元化的特点。2C充电充电机官方
霍克充电机CAN通讯介绍
1.CAN报文结构:CAN报文由ID(标识符)、数据帧等组成,主要关注报文ID、数据内容、发送周期。例如,直流充电网的报文结构包括序号、控制字、数据长度、数据包个数、预留字节、PGN(报文组号)等。
2.通信标准:CAN物理层规定了充电机与BMS之间通信的接口、电气特性和传输速率等要求。推荐使用250kbit/s的传输速率,并且使用符合ISO11898-1:2003标准的屏蔽双绞线接口。
3.CAN帧格式:CAN帧格式由起始位、仲裁域、数据域、控制域和结束位组成。每个CAN帧包含一个PDU(协议数据单元),PDU由优先权、保留位、数据页、PDU格式、PDU特定、源地址和数据域组成。
4.通信流程:充电机与BMS的CAN通信包括充电握手阶段、参数配置阶段、充电阶段和充电结束。在握手阶段,BMS识别接入的是车载充电机还是直流充电桩,以选择对应的通信协议。充电阶段,BMS控制继电器闭合使主回路导通,实现电池组充电。安全监控帧处理确保了充电系统的安全性和可靠性。 2C充电充电机官方