无人机的智能化是推动低空经济发展的重要引擎,打造智能无人机需要通信、控制、传感器等多种技术的共同作用,其中图像处理板的目标检测识别技术能够在智慧巡检、智慧交通管理、智慧河湖巡查等领域有着积极作用。在成都慧视开发的多款图像处理板中,Viztra-LE026以小型化、低功耗的特点深受行业青睐。Viztr...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
现在城市里面植被丰富,天气干燥时加上不少树林落叶、枯枝和枯草,在室外烧纸、点火或乱扔烟头,就会容易引起火灾。国家明令禁止在公共场所吸烟,因此除了法律的约束,更加便捷的手段应该予以应用来弥补人力监管的不足。在火星识别领域,慧视光电开发的RV1126图像处理板,凭借小巧精悍的性能,优异的识别能力,具有重要作用。通过在传统监控、摄像头等设备中内置RV1126图像处理板,板卡将自带目标识别算法,能够对微小火星起到精确识别的功能,一旦目标区域出现火星,就能立刻向监管人员发出警报。反应时间越快,就越能杜绝火灾的发生,而快速响应的火星识别技术就是人力监管的得力帮手。慧视光电对RV1126跟踪板进行二次开发,实现AI智能应用。多系统适配目标跟踪性价比
目标跟踪
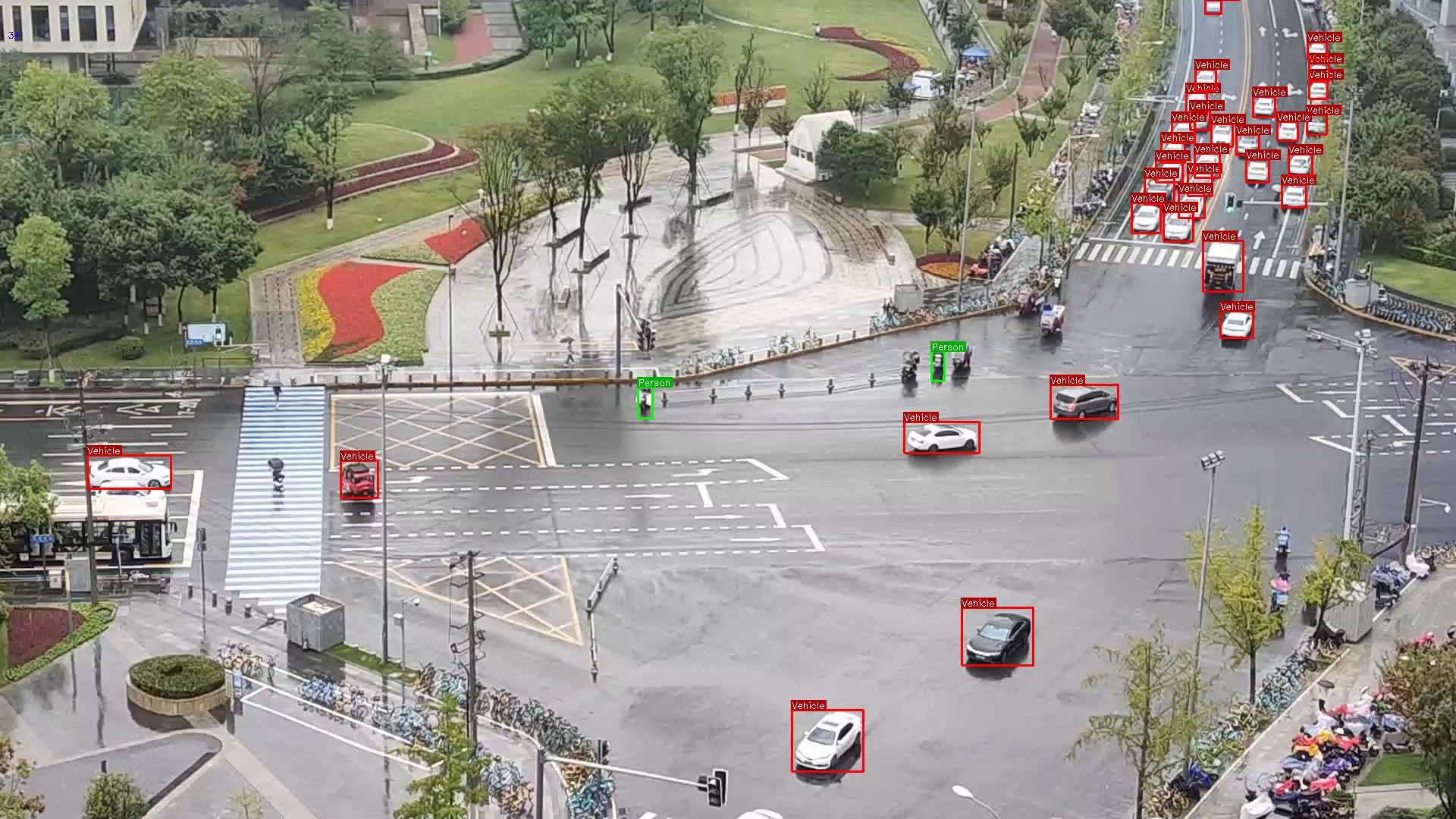
跟踪任务与检测任务有着密切的关系。从输入输出的形式上来看,这两个任务是极为相似的。它们均以图片(或者视频帧)作为模型的输入,经过处理后,输出一堆目标物置的矩形框。它们之间比较大的区别体现在对“目标物体”的定义上。对于检测任务来说,目标物体属于预先定义好的某几个类别,如图1左图所示;而对于跟踪任务来说,目标物体指的是在首帧中所指定的跟踪个体,如图1右图所示。实际上,如果我们将每一个跟踪的个体当成是一个类别的话,跟踪任务甚至能被当成是一种特殊的检测任务,称为个体检测(Instance Detection)。网络目标跟踪功效RV1126图像处理板识别概率超过85%。

目标跟踪(Target Tracking)是近年来计算机视觉领域比较活跃的研究方向之一,它包含从目标的图像序列中检测、分类、识别、跟踪并对其行为进行理解和描述,属于图像分析和理解的范畴。从技术角度而言,目标跟踪的研究内容相当丰富,主要涉及到模式识别、图像处理、计算机视觉、人工智能等学科知识;同时,动态场景中运动的快速分割、目标的非刚性运动、目标自遮挡和目标之间互遮挡的处理等问题也为目标跟踪研究带来了一定的挑战。由于目标跟踪在视频会议、安全监控、导弹制导、医疗诊断、高级人机交互及基于内容的图像存储与检索等方面具有广泛的应用前景和潜在的经济价值。
由于侵入的目标的形状和颜色等特征是难以固定的,再加上监控的场景,即背景往往比较复杂,只利用一个单帧图像就找出移动的目标是非常困难的。然而,目标的运动导致了其运动时间内,监控场景图像的连续变化,所以,使用图像序列分析往往是比较有效的,而且适合于低信噪比的情况。由于监控系统通常监控的视野比较大,系统设置的环境较为恶劣,图像传输的距离较远,从而导致图像的信噪比不高,因此采用突出目标的方法,需要在配准的前提下进行多帧能量积累和噪声抑制。在该技术中,要研究的问题有,相邻的两幅或多幅图像之间的关系是什么关系,是简单的图像差的值,还是多幅之间差的最大值,还是其他的与图像减法之间的其他函数关系,是尤其需要研究的。在研究中,研究如何差,如何自动得到差图像的分割门限,如何减小背景和突出目标是研究的方向。图像识别跟踪可以在有些领域代替人员实现24小时不间断监测!

基于特征匹配的跟踪方法不考虑运动目标的整体特征,通过有目的的提取序列图像中的过零点、边缘轮廓、线段等相关特征或是部分特性,并建立匹配模板,对目标对象进行特征匹配,达到对目标对象跟踪的目的。假定运动目标可以由惟一的特征**表达,搜索到该相应的特征就认为跟踪上了运动目标。除了用单一的特征来实现跟踪外,还可以采用多个特征信息融合在一起作为跟踪特征。该算法主要包括特征提取和特征匹配两个方面。其中,特征提取指的是针对所包含的目标对象的序列图像选择合适的目标跟踪特性。有没有能够进行目标跟踪的产品?江西目标跟踪功能
慧视RK3399PRO板卡可以用于大型公共停车场。多系统适配目标跟踪性价比
目标跟踪算法具有不同的分类标准,可根据检测图像序列的性质分为可见光图像跟踪和红外图像跟踪;又可根据运动场景对象分为静止背景目标跟踪和运动背景下的目标跟踪。由于基于区域的目标跟踪算法用的是目标的全局信息,比如灰度、色彩、纹理等。因此当目标未被遮挡时,跟踪精度非常高、跟踪非常稳定,对于跟踪小目标效果很好,可信度高。但是在灰度级的图像上进行匹配和全图搜索,计算量较大,非常费时间,所以在实际应用中实用性不强;其次,算法要求目标不能有太大的遮挡及其形变,否则会导致匹配精度下降,造成运动目标的丢失。多系统适配目标跟踪性价比
与目标跟踪相关的文章

山东高性能目标跟踪
- 湖南低压线目标跟踪 2026-05-13
- 高性能目标跟踪优势 2026-05-12
- 江苏目标跟踪联系方式 2026-05-11
- 新疆目标跟踪联系方式 2026-05-11
- 江苏无源目标跟踪 2026-05-11
- 江西目标跟踪售后服务 2026-05-10
- 新疆安全目标跟踪 2026-05-10
- 甘肃目标跟踪生产企业 2026-05-10
- 福建智能化目标跟踪 2026-05-10
- 湖南无线目标跟踪 2026-05-10
- 福建国产目标跟踪 2026-05-10
- 吉林目标跟踪生产企业 2026-05-10
与目标跟踪相关的产品


与目标跟踪相关的新闻
-
智能化目标跟踪性价比 2026-05-09 11:01:40东北虎作为生活在我国东北地区的保护动物,时不时会闯入居民区,给居民生命安全造成威胁,此前不就黑龙江七台河市勃利县一村落就出现了东北虎伤人事件,伤人后东北虎不知去向,消防和公安紧急寻找。值得关注的是,公安采用了无人机进行巡查,这种方式不仅比传统的地毯式搜索效率更高,而且面对东北虎这样危险的生物,安全性...
-
湖北目标跟踪设备 2026-05-09 17:01:26eVTOL是指电动垂直起降飞行器,大力开展eVTOL试点,是对低空经济的强动力注入,而无人机正是这一领域的关键选择之一。无人机在低空经济中扮演者重要角色,随着应用领域的不断增多,未来无人机的数量将呈式增长,届时eVTOL起降中心将聚集众多各式各样的无人机,如何高效有序的让无人机彼此工作而不互相干扰是...
-
智能化目标跟踪生产企业 2026-05-09 09:01:15无人机在军备领域有着突出作用,它不仅能帮助进行信息侦查,还能进行智能炮弹高空精细打击。其中,在智能精细打击领域,少不了人工智能的参与。通过人工智能的控制分析,能够实现对打击目标的AI识别。选择这样的方式,能够减少末端打击时对方电子干扰的影响,尽可能保证无人机的重复使用,图像处理设备显然比无人机本身更...
-
青海目标跟踪有什么 2026-05-09 20:01:27实现这些功能的技术中,图像处理基于AI图像处理板这一传感器。板卡具备快速图像处理识别的硬件能力,植入相应的AI算法,无人机就相当于装上了“智慧眼”,而且这个“智慧眼”居于高空,能够在一个定点,俯瞰大范围,实时监控货物的存放状态。远程控制技术基于网络通信,通过和图像处理板的结合,能够实现低延时低带宽的...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

重庆RK3399开发板图像识别模块算法定制
2026-05-16 -

云南图像识别模块产品
2026-05-16 -

河南光纤数据目标检测要多少钱
2026-05-16 -

广东目标检测有什么
2026-05-16 -

山东人防目标检测价格信息
2026-05-16 -

贵州车流图像识别模块
2026-05-16 -
湖北人流图像识别模块定制方案
2026-05-16 -

辽宁比较好的目标检测
2026-05-16 -

四川高清视频产品有哪些
2026-05-16