三角法激光测距即光源、被测物面、光接收系统三点共同构成一个三角形光路,由激光器光源发出的光线,经过准直透镜聚焦后入射到被测物体表面上,光接收系统接收来自入射点处的散射光,并将其成像在光电探测器敏感面上,通过光点在成像面上的位移来测量被测物面移动距离的一种测量方法。相比相位式激光测距和调频连续波激光测...
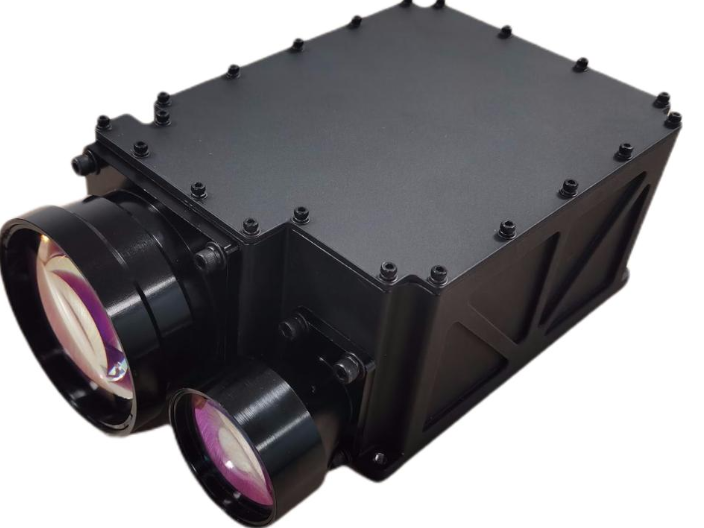
激光测距基本参数
- 品牌
- 慧视光电
- 型号
- HSL-2005
- 类型
- 便携式
- 测量范围
- 25000
- 测量精度
- 500
- 用途
- 测距
- 加工定制
- 是
- 重量
- 2
- 厂家
- 成都慧视光电技术有限公司
- 外形尺寸
- 207mm×125mm×80mm
- 产地
- 成都
激光测距企业商机
为了避免人们生活中的纠纷,一个房间和一个测试是不可或缺的。房屋验收机构或房屋检查员的一个房间和一个测试,工作量的激增和交付时间提高了房屋检查的效率。要求。例如,家庭验收项目中的空间尺寸误差对测量精度提出了更高的要求,因此激光测距仪等必要的仪器变得不可或缺。房屋测量也一直是房屋管理部门的关心和努力。住宅区地图直接用作产权证书图纸,具有法律效力。它不仅直接面向人民,而且直接关系到人民的经济利益。因此,控制房屋的测量误差尤为重要。根据以往的实践,通过卷尺或钢卷尺测量施工面积和使用面积可以满足基本要求。但在远程测量中,测量层要求高,难以到达地面的测量误差大,存在劳动强度大、工作复杂等缺点。在当今高科技的快速发展中,这种原始和传统的测量方法显然不符合当今信息社会的快速有效要求。记录红外线热像仪或红外线测温仪发现的积水或漏水位置。河南智能激光测距供应商

在当下火热的无人驾驶领域,也是激光测距传感器大显身手的地方谷歌的无人驾驶汽车一个“突出”的特点就是其车顶上方的旋转式激光测距仪,该测距仪能发出64道激光光束,帮助汽车识别道路上潜在的危险。该激光的强度比较高,能计算出200米范围内物体的距离,并借此创建出环境模型。整个系统的是车顶上的激光测距仪。该设备在高速旋转时向周围发射64束激光,激光碰到周围的物体并返回,便可计算出车体与周边物体的距离。计算机系统再根据这些距离数据描绘出精细的3D地形图,然后跟高分辨率地图相结合,生成不同的数据模型供车载计算机系统使用。汽车顶部的激光测距仪是整套系统的无人驾驶系统描绘出的3D地形图。湖南快速激光测距体积小测量因中间存在障碍物而无法使用皮尺或卷尺测量的空间长度。

调频连续波激光测距是另一种可以实现测量的干涉测量方法,它结合了光学干涉和无线电雷达技术的优点。调频连续波测量的基本原理就是通过调制激光束的频率来实现干涉测量。一般是利用输出激光束的频率随时间变化的激光器作为光源,以迈克尔逊干涉仪作为基本的干涉测量光路,根据参考光和测量光经过的光程不同而产生频差信息,提取信号再经过处理就可得到两束光的距离信息,实现距离的测量。调频连续波激光测距以激光为载体,所有环境干扰影响测量信号的光强,而不会影响频率信息,因此能获得较高的测距精度和较强的抗环境光干扰能力,精度可达到微米级,是目前大尺寸高精度测量应用中的研究热点。不过该测量方法对激光束频率的稳定度、线性度的要求很高,从而使得系统的实现较复杂,而且测量范围受周期T的限制,无法做到很大。
激光测距传感器先由激光二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号。记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离。激光测距传感器的特点是测量范围广,响应速度快;远距离测量无需反光板;测量精度高量程大;905纳米安全激光对人眼无伤害;体积小安装调试方便;在线式连续测量达到无人值守连续监测准确地确定房间大小以确定清洁气体灭火系统的化学浓度。

此外,生活还有一种基于激光测距仪的电梯,涉及电梯的技术领域,其技术方案要点是:一种基于激光测距仪的电梯,包括电梯控制系统,所述电梯控制系统包括由电梯主控板为组成的控制电路,所述电梯主控板的输入端通讯连接有电气控制装置,其输出端连接有冗余制动保护装置,所述电气控制装置连接有用于实时检测轿厢位置的激光测距仪,并向电气控制装置发送位置信号;所述电气控制装置预设有各楼层的位置数据,所述电气控制装置根据位置信号与所去楼层的位置数据进行比较,以判断是否向电梯主控板发送减速信号,以控制冗余制动保护装置。本实用新型的基于激光测距仪的电梯以保证乘客乘坐电梯的安全可靠性,防止电梯轿厢的冲顶或蹲底。测量应急灯、喷洒器、灭火器的安装距离(包括顶棚高度)。湖南快速激光测距体积小
测量消防设备(灭火器、灭火毯等等)与机器之间的距离。河南智能激光测距供应商
激光测距是以激光器作为光源进行测距。根据激光工作的方式分为连续激光器和脉冲激光器。氦氖、氩离子、氪镉等气体激光器工作于连续输出状态,用于相位式激光测距;双异质砷化镓半导体激光器,用于红外测距;红宝石、钕玻璃等固体激光器,用于脉冲式激光测距。激光测距仪由于激光的单色性好、方向性强等特点,加上电子线路半导体化集成化,与光电测距仪相比,不仅可以日夜作业、而且能提高测距精度。成都慧视自研的激光测距有六种型号,可以应用于各行各业。河南智能激光测距供应商
与激光测距相关的文章
安徽可靠激光测距供应商
- 河南安全激光测距定制 2024-11-22
- 海南手持激光测距生产商 2024-11-20
- 湖北性价比突出激光测距厂家 2024-11-20
- 广东国产化激光测距体积小 2024-11-19
- 重庆高精度激光测距供应商 2024-11-19
- 贵州激光测距定制 2024-11-18
- 福建稳定激光测距 2024-11-18
- 江西稳定激光测距公司 2024-11-18
- 海南远距离激光测距定制 2024-11-18
- 福建可靠激光测距品质保证 2024-11-18
- 河南远距离激光测距 2024-11-18
- 四川可靠激光测距定制 2024-11-17
与激光测距相关的产品


与激光测距相关的新闻
-
江苏安全激光测距批发 2024-11-15 09:04:07此外,生活还有一种基于激光测距仪的电梯,涉及电梯的技术领域,其技术方案要点是:一种基于激光测距仪的电梯,包括电梯控制系统,所述电梯控制系统包括由电梯主控板为组成的控制电路,所述电梯主控板的输入端通讯连接有电气控制装置,其输出端连接有冗余制动保护装置,所述电气控制装置连接有用于实时检测轿厢位置的激光测...
-
湖南专注激光测距定制 2024-11-14 20:03:58激光测距仪使用时需要注意的问题:激光测距仪不能对准人眼直接测量,防止对人体的伤害。同时,一般激光测距仪不具防水功能,所以需要注意防水。的美国里奥波特激光测距仪,由于在美国当地主要适用于户外狩猎爱好者,所以制作之处的优势即是可以防水防雾,配有丛林树木枝叶涂彩。激光器不具备防摔的功能,所以激光测距仪很容...
-
安徽专注激光测距重量轻 2024-11-14 17:03:43激光测距仪分为三大类,手持激光测距仪测量距离一般在200米内,精度在2mm左右。这是使用范围广的激光测距仪。在功能上除能测量距离外,一般还能计算测量物体的体积。望远镜式激光测距仪测量距离一般在600-3000米左右,这类测距仪测量距离比较远,但精度相对较低,精度一般在1米左右。主要应用范围为野外长距...
-
福建安全激光测距技术 2024-11-14 20:03:58卫星激光测距(SLR)和月球激光测距(LLR)使用短脉冲激光和的光学接收器和定时电子设备测量从地面站到地球轨道卫星和月球上的逆射器阵列的双向飞行时间(以及距离)。如今国际激光测距服务(ILRS)组织的合作观测站遍布全球,并与各国的组织机构相互合作,提供全球卫星和月球激光测距数据及其相关产品,以支持大...
与激光测距相关的问题
新闻资讯
产品推荐
-
内蒙古企业目标识别创意
2024-11-23 -
天津省时省力目标识别
2024-11-23 -

江西安全目标识别开发
2024-11-23 -
广东快速目标识别售价
2024-11-23 -

天津哪里有目标识别定制
2024-11-23 -

江西多系统适配目标识别售价
2024-11-23 -
内蒙古网络目标识别系统
2024-11-23 -
安徽移动目标识别办公软件
2024-11-23 -

江苏企业目标识别开发
2024-11-23