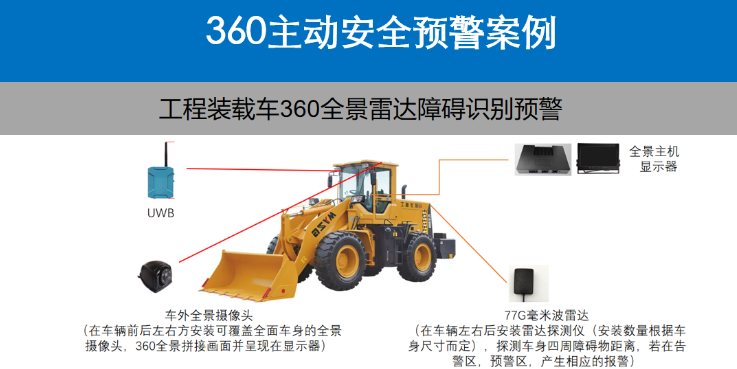
车侣工程车360全景影像系统融合超声波雷达的使用价值在于,提供更四周和精确的车辆周围环境感知和安全预警,从而保障工程车在行驶、作业过程中的安全性和效率。具体来说,360全景影像系统可以实时采集车辆四周的影像信息,帮助驾驶员四周了解车辆周围环境,避免盲区和死角。而超声波雷达可以检测车辆周围的物体,包括其他车辆、行人、障碍物等,实时发出预警信号,提醒驾驶员注意安全。当360全景影像系统与超声波雷达融合使用时,可以发挥各自的优势,形成更强大的车辆感知和安全预警系统。例如,当360全景影像系统检测到有车辆或人靠近时,可以触发超声波雷达进行更精确的测距和预警,提高预警的准确性和及时性。同时,超声波雷达也可以弥补360全景影像在雾天、雨天等恶劣天气下的视线受阻问题,提高系统的可靠性和适应性。综上所述,工程车360全景影像系统融合超声波雷达的使用价值在于提供更四周、精确的车辆环境感知和安全预警,为工程车行业添加一份更安全的保障。 精拓电子的工程车360有哪些优势?装载机360度全景摄像头雷达预警
车侣工程车360全景影像系统与CMS盲区预警融合的应用价值在于提供更四周、更精细的车辆周围环境感知和安全预警,进一步保障工程车在行驶、作业过程中的安全性和效率。具体来说,工程车360全景影像系统可以实时采集车辆四周的影像信息,消除因车身遮挡导致的驾驶盲区,帮助驾驶员四周了解车辆周围环境,避免盲区和死角。而CMS盲区预警系统可以通过车载传感器探测车辆周围的物体,对车辆侧后方盲区进行实时监测和预警,有效减少车辆的盲区范围,避免因盲区导致的交通事故。当这两者进行融合应用时,可以发挥各自的优势,形成更强大的车辆感知和安全预警系统。工程车360全景影像系统可以提供更四周、更真实的车辆周围环境图像,而CMS盲区预警系统可以提供更精细、更实时的侧后方盲区监测和预警,两者结合可以提供更加四周、精细的车辆环境感知和安全预警,为工程车的安全行驶和作业提供有力保障。此外,这种融合应用还可以与工程车的其他设备进行兼容,实现信息的共享和交互,进一步提高工程车行驶和作业的效率和安全性。 工程抢修车在复杂的施工环境下,工程车360全景影像系统如何帮助提高工作效率?

安装工程车360全景影像系统对工程车有以下应用效果:安全监控:360全景影像系统可以提供四周的视角,工程车周围的所有角落和盲区。司机可以实时周围的环境,包括行人、车辆和其他障碍物,减少事故。记录和回放:全景影像系统通常具备录像和回放功能,可以记录司机的行车过程和现场情况,以便事后复查和分析,提供有力的证据和数据支持。操作辅助:全景影像系统可以为司机提供更清晰的视野,减少操作盲点,帮助他们更准确地掌握集装箱的位置和姿态,提高操作效率和精确度
安装工程车360度全景摄像头与主机需要注意事项,摄像头安装:根据车型选择合适的位置和方式安装四个摄像头。一般来说,前视摄像头可以安装在车前中网或车标处;后视摄像头可以安装在车后牌照灯或后备箱扣手处;左右视摄像头可以安装在后视镜底部或侧裙处。安装时要注意避开发动机高温部分、车体遮挡部分、倒车信号线路等影响因素。控制主机安装:控制主机是连接四个摄像头和显示屏幕的设备。视频信号与显示器要适配,并找到ACC、GND、B+、倒车检测线等电源线路,并与本产品电源线相接。然后按图接好线束,并将OBD插头接到原车OBD插座或导航CAN插座,将录像U盘与产品上的USB母口对插。在隧道等有限空间内作业,工程车360全景影像系统有何特殊优势?

工程车360全景影像系统还有以下作用:增强驾驶辅助功能:全景影像系统可以提供准确的车辆周围环境信息,包括车道边缘、障碍物、交通标识等。这些信息可以帮助驾驶员更好地掌握车辆位置和行驶路线,提供更的驾驶辅助。提高施工效率:全景影像系统使驾驶员可以***监控施工现场,更好地了解施工区域的布局和环境。这有助于优化工程车的操作,提高施工效率,并减少因为盲区造成的不必要的停顿和调整。预防***和破坏:全景影像系统可以记录车辆周围的实时影像,并提供证据以防止工程车遭受***和恶意破坏。这可以为车辆的安全提供保障,减少损失和维修成本。总的来说,工程车360全景影像系统在车外行人的作用不仅是提供安全保护,还包括增强驾驶辅助功能、提高施工效率以及预防***和破坏等方面。 车侣工程车360全景影像系统在危险品运输中的应用效果如何?360盲区侦测系统开发商
车侣工程车360全景影像系统,可以对设备进行全FW的检查和录像。装载机360度全景摄像头雷达预警
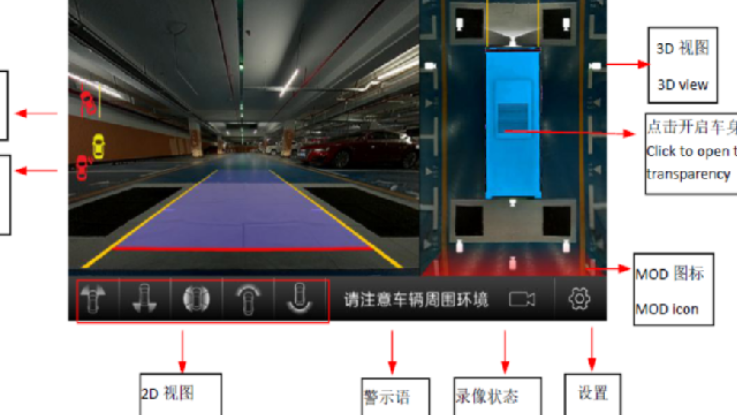
工程车360全景影像的拼接技术主要依靠图像拼接算法来实现。拼接技术的原理一般包括以下关键步骤:.图像采集:360全景影像系统会搭载多个广角摄像头或鱼眼镜头,安装在车辆的不同位置,用于采集周围环境的图像。.图像校正:由于鱼眼镜头的畸变效果,需要对采集到的图像进行校正,使其能够更准确地反映实际场景。常见的校正方法有极坐标转换和变换等。特征提取与匹配:对校正后的图像进行特征点提取,常用的特征点有角点、边缘等。然后通过特征点的匹配,找到不同图像之间的对应关系。.图像融合与拼接:通过对特征点的对应关系,可以确定图像之间的变换关系。利用图像融合算法,将多个图像拼接成一个全景图像。常见的拼接方法有重叠区域的平均融合、图像的均值投影等。补洞与平滑:在图像拼接过程中,可能会出现一些遮挡或间断的情况,需要进行补洞处理,填充缺失的区域。同时,还需要对拼接边缘进行平滑处理,使拼接后的图像过渡自然。6融合结果呈现:,拼接后的全景图像可以通过车载显示设备或其他方式呈现给驾驶员或其他相关人员。 装载机360度全景摄像头雷达预警