AGV/AMR充电节拍怎么计算:
1.**确定AGV的工作时间**:记录AGV在没有充电的情况下能够连续工作的时间长度。
2.**了解AGV的电池容量**:获取AGV电池的总容量,通常以安时(Ah)为单位。
3.**测量AGV的能耗**:计算AGV在单位时间内的能耗,这可以通过电池的放电率来估算。
4.**计算充电时间**:根据AGV的电池容量和充电机的输出功率来计算完全充电所需的时间。如果充电机的输出功率已知,可以使用以下公式:充电时间=耗电电量/充电电流
5.**考虑充电效率**:实际充电时间可能因为充电效率(通常小于100%)而有所不同。充电效率可以由制造商提供或通过实际测试获得。
6.**确定充电周期**:基于AGV的使用模式,确定何时进行充电。例如,如果AGV在晚上不工作,可以选择在这段时间内进行充电。
7.**计算充电节拍**:充电节拍是指AGV完成一次工作任务后返回充电站进行充电的频率。如果AGV的工作时间和充电时间已知,可以计算AGV在一天内需要充电的次数,从而确定充电节拍。
8.**优化充电策略**:根据AGV的工作模式和任务需求,可能需要优化充电策略以减少充电次数和提高效率。例如,可以在AGV的低峰时段进行充电,或者使用快速充电技术。 霍克充电机可编程充电曲线,自适应充电曲线,延保电池寿命兼容网络互联,手机远程监控,远程升级。江苏充电机彩页资料样本

无线充电的主流原理概览:
1.电磁感应:作为无线充电的基石,其原理类似变压器运作。充电垫或站的发射线圈生成交变磁场,当设备内的接收线圈靠近时,磁场感应生成电流,为设备充电。此技术高效且成熟,广泛应用于智能手机、智能手表等便携设备。
2.磁共振:利用谐振电路的共鸣效应,当发射与接收端频率匹配时,实现能量的远距离高效传输。相较于电磁感应,其传输范围更广。
3.无线电波:能量以无线电波形式编码传输,接收端捕捉并转换回电能。尽管传输效率受限,且受距离与功率影响,但展现了无线传输的广阔潜力。
4.电场耦合:专注于电场而非磁场,要求精确对齐且传输距离有限,但在特定场景下展现出独特优势。
5.光电效应:如太阳能电池板,将光能直接转换为电能,虽非无线充电主流,但在户外等特殊应用中别具价值。
6.超声波:创新性地以超声波为媒介,电能转化为超声波传输,再由接收端转换回电能,为无线充电开辟了新路径。
综上所述,电磁感应因其高效、成熟的特点,在无线充电领域占据主导地位。 山东高频充电机霍克质量控制:产品经过正规的高低温测试、校准检测、跌撞实验、震动实验、等严格的测试,品质如一。
霍克充电机对电池加热的几种用法策略:
1.动力电池充电加热回路控制方法:在动力电池电量低且单体温度较低时,先对电池进行加热,待温度达到设定阈值后再进行充电。这种控制方法可以避免因温度过低导致的充电困难和安全问题。加热装置通常包括加热电流测量装置、加热装置、加热熔断器、加热继电器等,加热装置会贴于电池包内部模组的表面。通过电池管理系统(BMS)与充电机通信,调整充电机的输出电压和电流,实现加热和充电状态的切换。
2.脉冲电流加热:在快速加热的场景下,可以使用脉冲电流对电池进行加热。这种方法可以借助大功率双向充电桩实现,提供了车载的大功率脉冲电流源,从而实现电池的快速加热。
3.电阻加热方式:常见的电阻加热方式包括电加热膜和PTC加热。这些加热方式通过电阻发热对电池系统进行加热。PTC加热器的电阻会随自身温度的升高而增大,实现恒温加热效果。
4.低温加热策略:在低温条件下,BMS会根据电池的温度状态来控制加热继电器的闭合,请求充电电压和电流,以实现对电池的加热。当电池温度达到一定值后,再进行正常的充电过程。
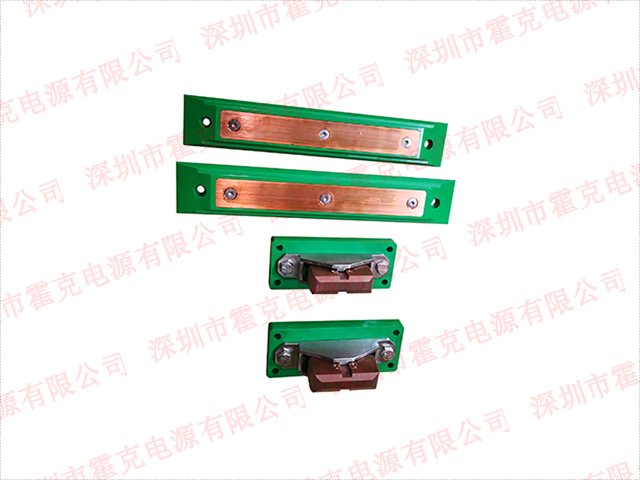
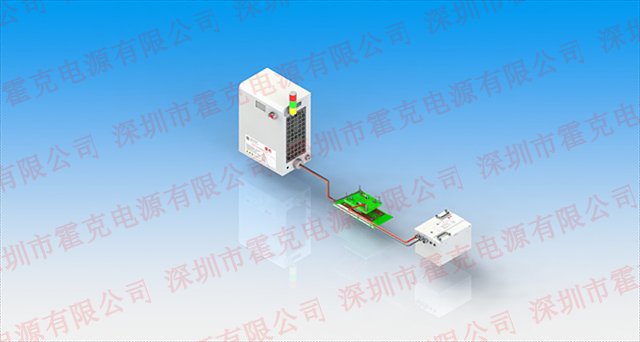
侧充自动充电充电流程:
1)、充电机与AGV采用盲充方式进行充电
2)、当AGV需要充电时,接近充电机的充电位,充电机通过光电感应到AGV就位时,自动伸出伸缩机构。
3)、上位机可以根据wifi或者网线获得充电机伸缩机构的压到位信号。如果压到位了,上位机发送启动信号。
4)、充电机接收到上位机的启动信号,并检测到电池端电压之后开始充电。
5)、当AGV充满或需要离开时,上位机发送停止信号,充电机自动缩回伸缩机构。等待3~5s之后AGV可以离开充电点。在充电过程中,AGV也可以通过断开充电接触器停止充电。 一般选择与蓄电池品牌配套的叉车充电器,以确保兼容性和充电效率。比如充电机都选用霍克品牌的。

当连接锂电池充电机后发现充不上电,可能的原因:
1.电池电压与充电机不匹配:需要确认所使用的电压与充电机的额定电压是否匹配,不匹配可能会导致充电机无法正常工作或损坏电池。
2.电池或充电机故障:电池可能存在问题,或者充电机内部元件损坏、短路或接触不良。
3.过热保护:如果充电环境温度过高,充电机会启动过热保护机制,停止充电。
4.电池管理系统(BMS)问题:BMS可能无法与充电机正常通信,或BMS自身存在故障,影响充电过程。
5.连接问题:检查电池与充电机的连接是否牢固,接触不良也会导致无法充电。
6.充电参数设置不当:例如充电电流或电压设置不合理,可能导致充电机输出过大电流或不匹配电池需求
7.电池老化:随着电池寿命的消耗,电池内部活性材料损失,电池容量减少。
8.指示灯或故障代码:充电机上的指示灯或故障代码可以提供故障信息,如电池错误、充电超时错误、电池过热等。
9.通讯问题:如果充电机与BMS之间的通讯出现问题,可能导致充电机无法接收正确的充电指令。
针对上述可能的原因,应逐一排查并采取相应的解决措施,如检查连接、更换损坏部件、调整充电参数、改善充电环境等。如果问题复杂或难以自行解决,应联系专业人员进行检查和维修。 AGV自动充电:对接完成后,AGV小车打开充电回路,中控系统通知充电桩开始充电。机器人充电机质保
涓流充电模式:这是一种低压预充电模式,适用于电压低于3V的电池,使用较小的电流进行充电。江苏充电机彩页资料样本
霍克充电机CAN通讯介绍
1.CAN报文结构:CAN报文由ID(标识符)、数据帧等组成,主要关注报文ID、数据内容、发送周期。例如,直流充电网的报文结构包括序号、控制字、数据长度、数据包个数、预留字节、PGN(报文组号)等。
2.通信标准:CAN物理层规定了充电机与BMS之间通信的接口、电气特性和传输速率等要求。推荐使用250kbit/s的传输速率,并且使用符合ISO11898-1:2003标准的屏蔽双绞线接口。
3.CAN帧格式:CAN帧格式由起始位、仲裁域、数据域、控制域和结束位组成。每个CAN帧包含一个PDU(协议数据单元),PDU由优先权、保留位、数据页、PDU格式、PDU特定、源地址和数据域组成。
4.通信流程:充电机与BMS的CAN通信包括充电握手阶段、参数配置阶段、充电阶段和充电结束。在握手阶段,BMS识别接入的是车载充电机还是直流充电桩,以选择对应的通信协议。充电阶段,BMS控制继电器闭合使主回路导通,实现电池组充电。安全监控帧处理确保了充电系统的安全性和可靠性。 江苏充电机彩页资料样本