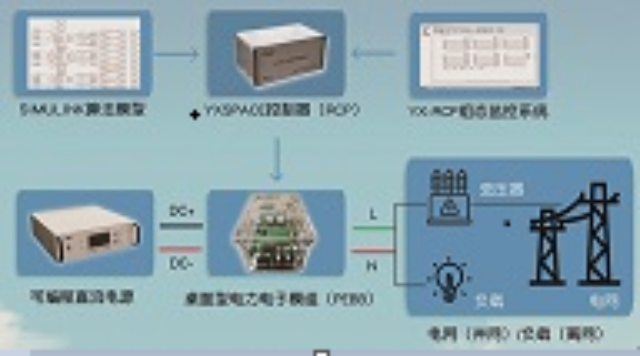
快速原型控制器采用高效的研发工具,能够缩短开发周期。传统的控制器开发方式往往涉及硬件定制、代码转译和调试等多个环节,而快速原型控制器则通过仿真器将算法快速下载实现,实现对实际对象的联调与测试。这种方式不仅减少了底层开发的负担,还能够在短时间内完成多次迭代和优化,提高开发效率。快速原型控制器具有易于部署的特点。传统的控制器开发需要对底层硬件进行深入了解,而快速原型控制器则通过提供丰富的接口和工具,使得开发者能够更加方便地将控制算法部署到实际系统中。这降低了开发难度,使得更多的工程师能够参与到控制器的研发工作中。YXSPACE能够将用户设计的图形化的高级语言编写的控制算法(Simulink)转提成DIDO、ALAO量。广东半实物仿真系统

模块化快速原型控制器的一个优点是其强大的扩展性。由于采用模块化设计,控制器可以方便地添加新的功能模块或扩展接口,以适应不同的应用场景。这种扩展性使得控制器能够普遍应用于各种制造业领域,如汽车制造、电子制造、机械制造等。在汽车制造领域,模块化快速原型控制器可用于实现控制算法的快速迭代评估。通过添加特定的功能模块和接口,控制器可以与生产线上的各种设备进行无缝对接,实现自动化生产过程中的精确控制和协调。这种应用不仅提高了开发效率,还降低了测试成本。电力电子半实物仿真平台企业快速原型控制器还具备强大的通信能力,可以与其他控制器、传感器和执行器进行高速、稳定的数据交换。
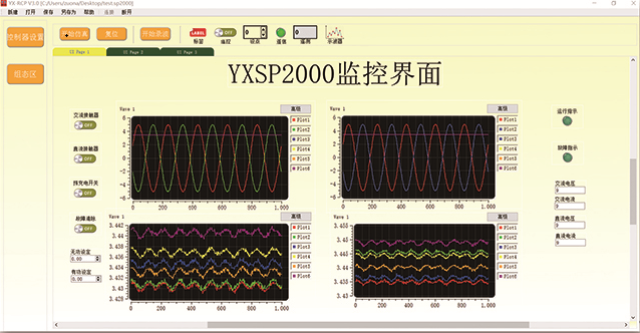
高精度快速原型控制器具有易于部署的优点。通过控制算法的直接部署,工程师们无需过多关注底层硬件的细节,从而减轻了底层开发的负担。此外,控制器还提供了丰富的接口和驱动程序,使得与其他设备的连接变得更为简单和便捷。这种易于部署的特性使得高精度快速原型控制器在多个项目中得到了普遍应用。无论是工业自动化生产线上的机器人控制,还是航空航天领域的飞行器导航,都可以看到这种控制器的身影。高精度快速原型控制器具备实时监测和在线调参的功能。工程师们可以通过控制器提供的实时监测界面,实时查看控制算法的运行状态和效果,从而及时发现并解决问题。同时,在线调参功能使得工程师们可以根据实际情况对控制参数进行灵活调整,以达到较佳的控制效果。这种实时监测和在线调参的便利性提高了控制系统的稳定性和可靠性。工程师们可以更加准确地控制被控对象的行为,实现更加精确和高效的控制。
人工智能快速原型控制器具有模块化、标准化的设计特点,使得它易于与其他系统进行集成和扩展。用户可以根据实际需求,选择适合的控制器模块进行组合和配置,以满足不同控制系统的要求。同时,由于其标准化的设计,使得控制器之间的通信和数据交换变得更加简单和高效,提高了系统的整体性能和可靠性。人工智能快速原型控制器基于深度学习和神经网络等算法进行模型训练和优化。这使得它能够不断地学习和优化自身的控制策略,以更好地适应控制对象的变化和不确定性。与传统的控制器相比,它无需手动调整控制参数,而是能够通过自动学习来找到较优的控制策略,从而提高了控制效率和精度。快速原型控制器的响应速度极快,能够在毫秒级别内完成控制指令的传输和执行。
快速原型控制器在研发过程中的实时监测和在线调参功能,使得用户能够及时发现并解决控制算法中存在的问题。通过在线调参,用户可以根据实际运行情况对控制参数进行微调,以达到比较好的控制效果。这种实时反馈和优化的机制不仅提高了产品的质量,还使得产品更加适应实际应用场景。快速原型控制器还具备强大的数据处理和计算能力,能够对复杂的控制系统进行精确的控制和调节。这种精确的控制能力使得产品能够更好地满足性能要求,提高了产品的可靠性。由于其高度可配置性和模块化设计,快速原型控制器能够适应各种复杂多变的控制需求。广西硬件在环测试系统
高可靠快速原型控制器具有好的扩展性,可以方便地与其他设备和系统进行集成。广东半实物仿真系统
快速控制原型控制器具有易于部署的优点。传统的控制器开发方式需要开发人员手动编写底层代码,进行硬件定制和调试,工作量巨大且容易出错。而基于DSP的快速控制原型控制器则通过高级语言(如Matlab/Simulink)进行算法设计,自动生成代码并下载到DSP中运行,简化了开发过程。同时,该控制器还支持实时监测和在线调参,使得开发人员能够快速发现控制算法中存在的问题并进行优化。基于DSP的快速控制原型控制器具有高度的灵活性和可扩展性。由于DSP具有丰富的外设接口和强大的通信能力,它可以轻松地与各种传感器、执行器和其他外部设备进行连接和通信。这使得控制器能够适应不同的应用场景和需求,实现多种功能的集成和扩展。此外,DSP的快速原型控制器还支持多项目并行开发和资源共享,提高了研发效率。广东半实物仿真系统