模块化快速原型控制器的一个优点是其强大的扩展性。由于采用模块化设计,控制器可以方便地添加新的功能模块或扩展接口,以适应不同的应用场景。这种扩展性使得控制器能够普遍应用于各种制造业领域,如汽车制造、电子制造、机械制造等。在汽车制造领域,模块化快速原型控制器可用于实现控制算法的快速迭代评估。通过添加特定的功能模块和接口,控制器可以与生产线上的各种设备进行无缝对接,实现自动化生产过程中的精确控制和协调。这种应用不仅提高了开发效率,还降低了测试成本。快速原型控制器凭借其独特的优势,在多个科研得到了普遍应用。大数据快速原型控制器选择

电机控制算法是通过一系列的数学模型、控制策略和计算方法,实现对电机运动状态的精确控制。它涵盖了电机启动、加速、减速、停止等全过程的控制,以及电机参数调整、故障诊断等辅助功能。电机控制算法的性能直接影响到电机的运行效率、能耗、稳定性以及使用寿命。电机控制算法的评估是确保电机控制系统性能优良的关键环节。通过对电机控制算法的评估,可以了解算法在实际应用中的表现,发现潜在的问题,为算法的优化提供依据。同时,电机控制算法的评估还可以为电机的选型、控制系统的设计提供参考,有助于提高整个电机控制系统的性能。河南模块化快速原型控制器快速原型控制器具备强大的数据处理能力,能够实时处理大量的控制数据,确保控制精度的同时提高工作效率。

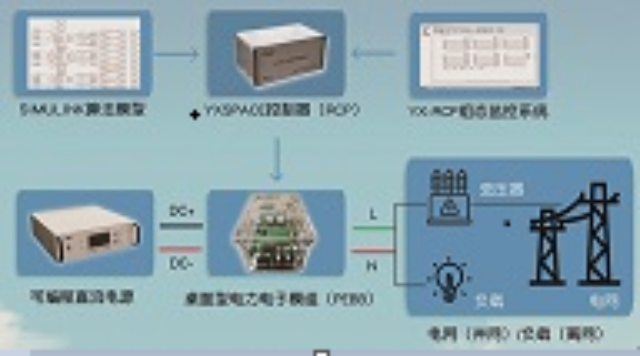
快速原型控制器,也被称为快速控制原型(Rapid Control Prototype,简称RCP),是一种基于实际硬件平台的控制系统开发工具。它利用先进的计算机技术和实时仿真技术,能够实现对控制系统的快速构建、测试和优化。快速原型控制器的主要作用是将设计好的控制算法与实际被控对象相结合,通过实时反馈和调整,使被控对象达到预期的控制效果。在控制算法的设计过程中,开发者可以利用MATLAB、Simulink等仿真工具进行建模和仿真分析,验证控制算法的可行性和性能。然后,通过快速原型控制器,将控制算法与实际被控对象进行实时连接,进行在线测试和调试。这种半实物仿真方式使得开发者能够在产品设计初期就发现潜在的问题,并及时进行优化和改进,从而缩短了产品的研发周期,降低了开发成本。
快速原型控制器能够将用户设计的图形化的高级语言编写的控制算法(Simulink)转换成DIDO、AIAO量,完成实际硬件控制。控制算法模型一般采用Matlab中的Simulink工具搭建,将模型中的接口与硬件驱动接口绑定后,再结合TI公司的CCS编译工具产生可执行文件,下载至YXSPACE控制器中运行。快速原型控制器主要用于配置YXSPACE控制器工作模式,同时可以实时监测控制过程中的各类运行量,包括采集量、中间控制变量等。YXSPACE-VIEW2000包括了6类组态控件,分别为遥控控件、遥信控件、遥调控件、遥测控件、示波器控件以及文字编辑控件等。用户可以借助这些控件,直观、方便的搭建监控界面,监控控制器内部运行的详细信息。高可靠快速原型控制器具有高度的灵活性,能够轻松适应不同的控制需求。
快速原型控制器支持实时监测和在线调参功能。这意味着在开发过程中,开发者可以实时观察控制器的运行状态和参数变化,从而快速发现控制算法中存在的问题。同时,通过在线调参功能,开发者可以方便地调整控制参数,优化控制效果。这种实时监测和在线调参的能力提高了开发效率和调试的便捷性。快速原型控制器具有高度的灵活性,能够适应多种应用场景的需求。无论是三维打印机、CNC加工中心还是激光快速成型机等设备,都可以通过快速原型控制器实现数字信号控制和指令解码,实现快速原型的制造。此外,快速原型控制器还可以应用于自动驾驶车辆、车辆稳定性控制、混合动力/纯电动整车控制等领域,满足各种复杂控制需求。高可靠快速原型控制器采用了高标准的硬件设计和制造工艺,确保了其出色的耐用性和长寿命。大数据快速原型控制器选择
借助先进的算法和精确的传感器,快速原型控制器能够实现高精度的控制和监测。大数据快速原型控制器选择
快速原型控制器在工业控制场合中的应用——电机是工业控制场合中常见的被控对象之一。快速原型控制器可以应用于电机的速度控制、位置控制等场景。通过实时接收电机的反馈信号,如转速、位置等,并根据控制算法计算出相应的控制信号,实现对电机的精确控制。这种控制方式不仅提高了电机的控制精度和稳定性,还降低了能耗和维护成本。在机器人控制领域,快速原型控制器也发挥着重要作用。机器人控制系统需要实现复杂的运动轨迹规划和实时控制。快速原型控制器能够实现对机器人运动学、动力学等模型的快速构建和仿真测试,帮助开发者验证和优化控制算法。同时,通过与实际机器人的实时连接,快速原型控制器还可以对机器人的运动轨迹进行精确控制,提高机器人的运动性能和稳定性。大数据快速原型控制器选择