- 品牌
- PMT派姆特,
- 型号
- PMT ALPHA-P
- 尺寸
- 1.5-4.5m
- 重量
- 8kg-10.6kg
- 产地
- 中国、德国
- 可售卖地
- 浙江,上海,江苏
- 是否定制
- 是
- 材质
- 航空碳纤维
- 配送方式
- 货运
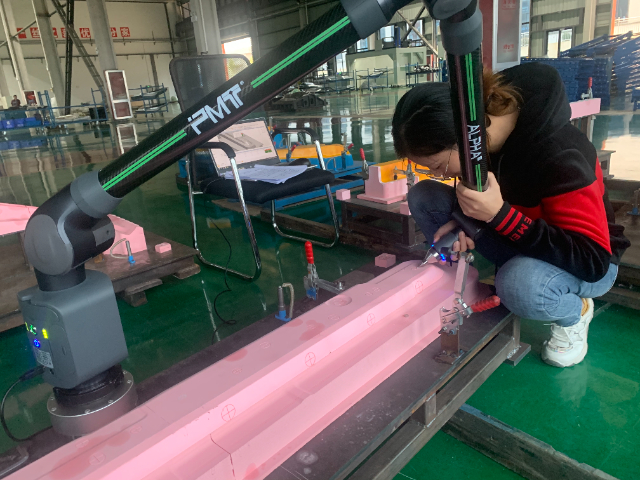
关节臂测量机是一种高精度的测量设备,用于精确测量和定位各种物体的位置、形状和尺寸。为了确保关节臂测量机的质量和性能,以下是一些关键步骤:材料选择:选择高质量的材料来制造关节臂测量机的零部件。这些材料应该是耐腐蚀、高硬度和耐磨损的。设计和制造:关节臂测量机需要精密的设计和制造。使用计算机辅助设计(CAD)软件进行设计和模拟,并使用先进的加工技术进行制造。检验和测试:对每个零部件进行严格的检验和测试,以确保它们符合规格和要求。这包括外观检查、尺寸测量、力学性能测试等。组装和调试:在组装关节臂测量机之前,应先对各个零部件进行检查和调试,以确保它们的正常运转。然后按照正确的顺序组装各个部件,并进行调试。质量管理:在整个生产过程中,应实施严格的质量管理措施,包括原材料采购、生产过程监控、成品检测等。只有通过所有质量管理步骤的产品才能出厂销售。我们相信,通过不断的努力和创新,关节臂测量机的未来将更加光明。金华美国关节臂厂家直销

在使用关节臂测量机之前,首先需要将设备放置在平稳的地面上,并确保仪器处于水平状态。接下来需要打开电源并启动设备。然后,根据实际需求判断是否需要更换测针,常用的规格有3mm、4mm、6mm。如果需要更换测针,需要在联机软件界面中选择合适的红宝石测针并进行球型校准。此外,还需要检查并校准探针,尤其是在温差变化过大的情况下。同时,注意软件界面对测量臂FaroArm关节转动极限位置的报警提示,尽量避免在设备接近极限状态下进行测量,以延长设备使用寿命。当完成所有的测量操作后,需要将ControlNice关节臂从三角座或三脚架上拆卸,直接放回箱内以保护设备。上海德国关节臂哪家强目前关节臂测量机在全球市场的普及程度如何?

关节臂测量机的生产过程主要包括以下几个步骤:设计和规划:这是生产流程的第一步,包括确定产品规格、设计零部件和制定生产计划。材料选择:根据设计要求选择合适的材料,如铝合金、钢等。加工制造:将选定的材料通过切削、焊接、铸造等方法制成零部件的形状。精密加工:对零部件进行精密加工,如磨削、研磨等,以达到设计的精度要求。组装和调试:将加工好的零部件按照设计图纸组装成完整的关节臂测量机,并进行调试,确保其性能达到预期。质量检验:进行多面的质量检查,包括尺寸精度、表面粗糙度等方面。包装和出厂:通过合格的产品进行清洁、包装,然后进行出厂发货。售后服务:提供安装、调试、维修等售后服务。
对于关节臂测量机的研发者来说,他们在未来需要重点关注以下几个领域和方向:精度提升:随着超精加工、科学研究等领域对精度要求的不断提高,研发者需要寻求提高关节臂三坐标测量机的测量精度的方法。新材料的应用:现在,铝合金、陶瓷材料以及各种合成材料在测量臂中得到了越来越广泛的应用。因此,如何充分利用这些新型材料的特性,将之用于提升设备的质量和性能,将是研发者们需要面对的挑战。智能化:在科技不断发展的现在,智能化已经成为一个重要的发展趋势。关节臂的功能也需要由软件技术来发展和优化,例如发展智能测量机等。新技术的发展:除了上述提到的新材料和智能化外,新的技术,例如磁悬浮技术,也有望在测量机及测头中获得应用。我们的销售目标是让全球的客户都能使用到高质量的关节臂测量机。

关节臂测量机的生产过程中的关键步骤主要有以下几个环节:原材料的选择和准备:关节臂测量机的生产需要选择性能优良的材料,如高硬度钢材、铝材等。机械加工:包括切割、焊接、打磨等多种加工工艺,这一阶段决定了关节臂测量机的基本结构和尺寸。装配和调试:装配工作是将加工完成的零部件组装成一个完整的关节臂测量机,调试环节则是对设备进行各项参数的设定和校准,保证其测量精度和稳定性。软件编程和测试:这是为了确定并记录测头在三维空间中的位置,并通过软件报告测量结果。质量控制和检验:这一步骤主要是对已完成的关节臂测量机进行多面的性能检测和质量评估,确保其满足设计和生产要求。包装和出厂:将合格的关节臂测量机进行包装,准备发往销售商或用户。关节臂测量机的生产制作过程中如何进行质量管理?南京美国关节臂图片
我们期待与全球的合作伙伴共同推动关节臂测量机的发展。金华美国关节臂厂家直销
随着人工智能、大数据等技术的发展,关节臂测量机的未来将会有巨大的改变。例如,激光跟踪关节臂测量系统已经开始采用激光跟踪仪和关节臂坐标机相结合的方式,利用激光光束跟踪原理,并结合关节臂高刚性高柔顺性测头,对机器人位姿进行高精度和低成本检测。此外,对于大型关节和小型关节的测试设备,也正在进行详细的研究,以满足各种不同应用场景的需求。在实际应用方面,关节臂式坐标测量机已经广泛应用于工程与技术科学基础学科、机械工程领域等多个领域。金华美国关节臂厂家直销

关节臂的发展历程关节臂的发展可以追溯到上世纪中叶。当时,随着工业制造的快速发展,对三维坐标测量的需求日益增加。传统的固定式三坐标测量机虽然精度高,但体积庞大、价格昂贵,且不便于移动。为了解决这些问题,人们开始研究便携式的三维坐标测量设备。经过多年的努力,关节臂逐渐发展成熟。早期的关节臂主要采用机械结构,精度和稳定性相对较低。随着电子技术和计算机技术的不断进步,关节臂的性能得到了极大的提升。现代关节臂采用了先进的传感器技术、电子控制技术和软件算法,具有更高的精度、更快的测量速度和更强的稳定性。在机器人校准中,关节臂被用于测量机器人的运动轨迹和精度,确保机器人正常工作。江苏法如关节臂电话随着电子商...
- 无锡进口关节臂保养 2024-12-11
- 台州什么样关节臂多少钱 2024-12-11
- 绍兴海克斯康关节臂哪家好 2024-12-11
- 杭州关节臂直销价格 2024-12-11
- 浙江关节臂销售公司 2024-12-11
- 南京蔡司关节臂批发厂家 2024-12-10
- 江苏有哪些关节臂推荐厂家 2024-12-10
- 宁波派姆特关节臂品牌排行 2024-12-10
- 福建三坐标关节臂哪家好 2024-12-10
- 苏州德国关节臂供应 2024-12-10


- 江苏三坐标关节臂图片 2024-12-10
- 无锡如何选关节臂保养 2024-12-10
- 安徽蔡司关节臂图片 2024-12-10
- 浙江法如关节臂电话 2024-12-10
- 山东国产关节臂厂家批发价 2024-12-10
- 浙江有哪些关节臂厂家直销 2024-12-10


- 浙江关节臂销售公司 12-11
- 南京蔡司关节臂批发厂家 12-10
- 江苏有哪些关节臂推荐厂家 12-10
- 宁波派姆特关节臂品牌排行 12-10
- 福建三坐标关节臂哪家好 12-10
- 苏州德国关节臂供应 12-10
- 金华美国关节臂用途 12-10
- 常州法如关节臂保养 12-10
- 江西三坐标关节臂 12-10
- 无锡法如关节臂价格 12-10