- 品牌
- PMT派姆特,
- 型号
- PMT ALPHA-P
- 尺寸
- 1.5-4.5m
- 重量
- 8kg-10.6kg
- 产地
- 中国、德国
- 可售卖地
- 浙江,上海,江苏
- 是否定制
- 是
- 材质
- 航空碳纤维
- 配送方式
- 货运
关节臂测量机的发展历程可以分为几个关键阶段。首先,由HomerEaton先生在1986年创建ROMER公司,并推出了首台便携式关节臂测量机System6,标志着高精度现场测量技术新时代的开启。随后,ROMER公司发展迅速,随着市场需求的不断扩大,又在美国成立了Cimcore公司自主运营。到了2004年,海克斯康集团收购了法国ROMER和美国Cimcore两家公司,将其合并以及技术融合,进一步推动了关节臂测量机的发展。在全球范围内,关节臂测量机的市场占有率达到了25%,成为世界上先进的便携式测量系统之一,以精度高、稳定性高、性价比高而著称。经过50年的不断创新和发展,关节臂应用已遍布全球各个领域,在尺寸检测、3D数字化、逆向工程、快速成型等多种应用场景中扮演着重要角色。海克斯康集团凭借ROMER数十年的技术沉淀与始终坚持的创新精神,将关节臂测量技术的发展推向了全新高度。如何正确存储关节臂测量机以延长其使用寿命?台州美国关节臂维修电话

关节臂测量机的生产过程中需要的设备和工具主要包括:主机系统,这是整个设备的主要部分,负责管理各个部分的协同工作;激光测头系统,用于获取精确的测量数据;计算机系统,用于处理和分析收集到的数据;软件系统,支持设备的操作和管理数据。另外,扫描采集数据的过程中可能需要物件的表面处理和着色,例如对塑料、金属等反射效果较为强烈的材质进行喷施着色剂以增强模型表面的漫反射。还有一些必备的工具,比如用于初始化关节臂的工具,用于清理和准备要进行数据采集的表面的工具等等。以上所述只是一部分设备和工具,具体还需要根据生产环境和要求进行调整。无锡法如关节臂大概价格多少随着人工智能、大数据等技术的发展,关节臂测量机会有怎样的改变?
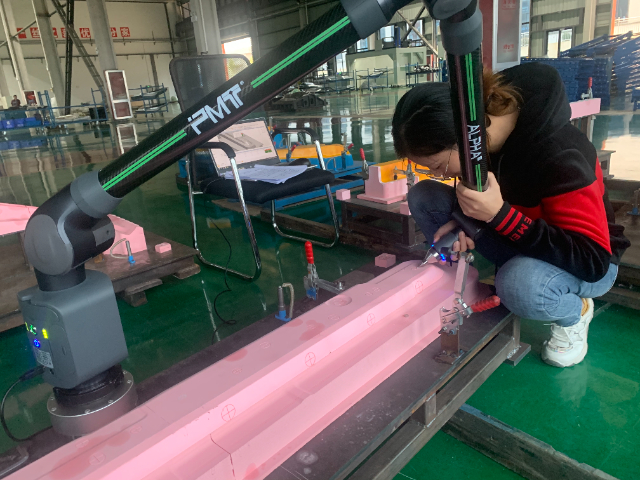
在安装和调整关节臂测量机时,需要遵循以下步骤:在开始测量之前,先确认设备是否完好无损。根据具体需求决定是否需要更换测针,常用的规格有3mm、4mm、6mm。将测量机放在稳定、平坦的平台上,以保证机器在使用过程中的稳定性。进行设备的联机设置,一般可以通过打开联机软件,开启蓝牙或数据线进行连接。安装探针时,一只手握住FaroArm末端的按钮区域;顺时针旋转探针,将探针转入FaroArm,使用12mm扳手拧紧。根据实际需求,调整关节臂测量机的角度和位置,确保测量的准确性和精度。运行设备,检查是否正常工作并校准设备,保证其准确性。以上步骤完成后,可以进行实际的测量操作。
定期校准:关节臂测量机需要定期进行校准,以确保其准确性和精度。使用标准件:在测量过程中,应使用已知尺寸的标准件进行对比,以检查测量结果的准确性。保持清洁:关节臂测量机的测量头和被测物体表面应保持清洁,避免灰尘、油污等影响测量结果。避免强磁场干扰:关节臂测量机对磁场非常敏感,因此在使用过程中应尽量避免强磁场的干扰。正确操作:操作人员应严格按照操作规程进行操作,避免因操作不当导致测量误差。选择适当的测量方法:根据被测物体的形状、大小和精度要求,选择合适的测量方法和设备。使用高质量的测量软件:高质量的测量软件可以提供更准确的测量结果,并具有自动识别和修正误差的功能。未来关节臂测量机的技术发展趋势是什么?

对于不熟悉关节臂测量机的人员,他们需要接受一些专门的培训才能安全、有效地使用这种设备。首先,他们需要学习关节臂测量机的工作原理和基本结构,理解其如何通过仿照人体关节的运动,实现多方向的自由移动来精确测量目标对象的三维坐标。接下来,他们需要熟悉关节臂测量机的基本功能以及相应的测量方法,包括各种几何量的测量。同时,也需要掌握如何使用设备进行有效的测量结果分析,将测量结果与数据模型进行比对,输出数模比对数据报告。此外,实际操作训练是必不可少的一部分。他们需要学习如何正确地安装设备,进行设备的调整和维护。在实践操作中掌握设备的操作技巧,以提高测量效率。安全问题是使用关节臂测量机时必须要注意的。他们需要了解在哪些情况下不能使用关节臂测量机,并学会在面临这些情况时如何应对以确保自身和设备的安全。关节臂测量机的生产制作需要哪些原材料?上海法如关节臂哪家好
关节臂测量机在各种行业都有多的应用,如制造业、建筑业等。台州美国关节臂维修电话
当设备出现故障或损坏时,关节臂测量机不能使用。在温度、湿度条件超出设备正常工作范围的环境里,也不能使用关节臂测量机。电源不稳定或者没有接地设施的环境下,关节臂测量机也不可以使用。如果操作人员未经过专业培训,对设备不熟悉的情况下,为了安全起见也不应使用关节臂测量机。在有强烈振动、电磁干扰等影响测量精度的环境下,也不宜使用关节臂测量机。在需要测量的对象表面存在易燃易爆、腐蚀性物质或者有磁场干扰的情况下,关节臂测量机也不能使用。台州美国关节臂维修电话

关节臂的发展历程关节臂的发展可以追溯到上世纪中叶。当时,随着工业制造的快速发展,对三维坐标测量的需求日益增加。传统的固定式三坐标测量机虽然精度高,但体积庞大、价格昂贵,且不便于移动。为了解决这些问题,人们开始研究便携式的三维坐标测量设备。经过多年的努力,关节臂逐渐发展成熟。早期的关节臂主要采用机械结构,精度和稳定性相对较低。随着电子技术和计算机技术的不断进步,关节臂的性能得到了极大的提升。现代关节臂采用了先进的传感器技术、电子控制技术和软件算法,具有更高的精度、更快的测量速度和更强的稳定性。在机器人校准中,关节臂被用于测量机器人的运动轨迹和精度,确保机器人正常工作。江苏法如关节臂电话随着电子商...
- 无锡进口关节臂保养 2024-12-11
- 台州什么样关节臂多少钱 2024-12-11
- 绍兴海克斯康关节臂哪家好 2024-12-11
- 杭州关节臂直销价格 2024-12-11
- 浙江关节臂销售公司 2024-12-11
- 南京蔡司关节臂批发厂家 2024-12-10
- 江苏有哪些关节臂推荐厂家 2024-12-10
- 宁波派姆特关节臂品牌排行 2024-12-10
- 福建三坐标关节臂哪家好 2024-12-10
- 苏州德国关节臂供应 2024-12-10



- 江苏三坐标关节臂图片 2024-12-10
- 无锡如何选关节臂保养 2024-12-10
- 安徽蔡司关节臂图片 2024-12-10
- 浙江法如关节臂电话 2024-12-10
- 山东国产关节臂厂家批发价 2024-12-10
- 浙江有哪些关节臂厂家直销 2024-12-10



- 浙江关节臂销售公司 12-11
- 南京蔡司关节臂批发厂家 12-10
- 江苏有哪些关节臂推荐厂家 12-10
- 宁波派姆特关节臂品牌排行 12-10
- 福建三坐标关节臂哪家好 12-10
- 苏州德国关节臂供应 12-10
- 金华美国关节臂用途 12-10
- 常州法如关节臂保养 12-10
- 江西三坐标关节臂 12-10
- 无锡法如关节臂价格 12-10