- 品牌
- 深圳市天盛德隆科技有限公司
- 型号
- 齐全
ADAS驾驶辅助设备在不同国家的交通法规下确保合规性,主要通过以下几个方面的努力:首先,设备制造商会针对各个国家的交通法规进行深入研究,以确保ADAS系统的设计和功能符合当地法规的要求。这包括对不同国家和地区的交通规则、道路标志、驾驶习惯等进行多方面考虑,从而确保ADAS系统在不同环境中都能提供准确、可靠的驾驶辅助。其次,ADAS设备通常会具备高度可配置性和适应性。这意味着设备可以根据不同国家的交通法规进行灵活调整,以满足当地的需求。例如,针对某些国家特定的交通标志或交通规则,ADAS系统可以通过软件更新或配置调整来适应这些变化。这款ADAS设备具有高度的集成性,易于安装和使用。杭州自动驾驶辅助设备在线询价

ADAS驾驶辅助设备通过利用多种传感器和先进的算法来区分静态和动态物体。这些传感器包括毫米波雷达、激光雷达、摄像头等,它们能够实时感知周围环境并收集数据。在区分静态和动态物体时,ADAS设备主要依靠物体在环境中的运动状态和变化特征。静态物体指的是那些位置相对固定的物体,如道路标志、路灯、树木等。这些物体在传感器获取的数据中通常表现为相对稳定的图像或信号特征。相比之下,动态物体则是指那些位置或状态在不断变化的物体,如车辆、行人、自行车等。这些物体在传感器获取的数据中会呈现出明显的运动轨迹或速度变化。珠海ADSA驾驶辅助设备如何使用ADAS设备可以与其他车载设备无缝连接,实现信息共享和协同工作。
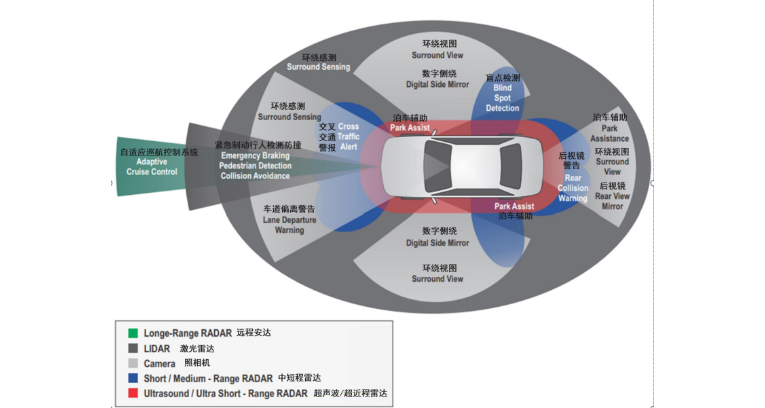
ADAS驾驶辅助设备通过采用多种传感器来实时感知路况,这些传感器主要包括摄像头、毫米波雷达、激光雷达和超声波雷达等。首先,摄像头用于捕捉车辆周围的图像,包括前方道路、行人、车辆以及其他障碍物。通过图像处理技术,系统能够识别和分析这些图像,以检测潜在的危险情况。其次,毫米波雷达能够发射并接收毫米波信号,通过测量反射回来的信号时间差,计算出物体与车辆之间的距离和速度。这种雷达对于探测前方的车辆和障碍物非常有效,尤其是在恶劣的天气条件下,其性能表现稳定。另外,激光雷达利用激光束扫描周围环境,通过测量激光束从发射到接收的时间差,来确定物体的距离和位置。激光雷达的精度非常高,能够提供详细的三维环境信息。
ADAS驾驶辅助设备进行交通标志识别主要通过以下几个步骤实现:图像采集:首先,设备利用前置摄像头等传感器捕捉道路前方的图像。这些摄像头通常安装在车辆的前部,能够清晰地捕捉到道路标志和交通信号。图像处理:采集到的图像随后会经过一系列图像处理算法。这些算法需要包括颜色识别、形状识别、边缘检测等,以从图像中提取出与交通标志相关的信息。标志识别:经过处理后,系统会尝试识别图像中的交通标志。这通常涉及到与预设的交通标志模板进行比对,或者利用机器学习算法进行模式识别。系统能够识别多种类型的交通标志,如限速标志、禁止进入标志、停止标志以及让行标志等。安装了ADAS的车辆,在夜间或恶劣天气下也能保持清晰的行车视野。
ADAS驾驶辅助设备通过一系列复杂的传感器、算法和数据处理技术来预测潜在的驾驶安全隐患。这些设备实时收集并分析车辆及其周围环境的信息,从而识别出需要导致危险的情况。首先,ADAS设备使用多种传感器来感知环境。这些传感器包括毫米波雷达、激光雷达、摄像头以及超声波传感器等,它们能够捕捉车辆周围的物体、距离、速度和方向等信息。这些传感器数据随后被传输到处理单元进行进一步的分析。其次,通过先进的算法和机器学习技术,ADAS设备能够处理并分析这些传感器数据。这些算法可以识别出静态和动态物体,并预测它们的运动轨迹。同时,系统还可以结合地图数据和交通规则,对道路情况进行评估,从而预测潜在的驾驶安全隐患。在城市拥堵路段,ADAS驾驶辅助设备为驾驶员提供了极大的帮助。镇江整车ADAS标定设备定制
借助ADAS的辅助,驾驶员在紧急情况下能够迅速做出反应,避免事故发生。杭州自动驾驶辅助设备在线询价
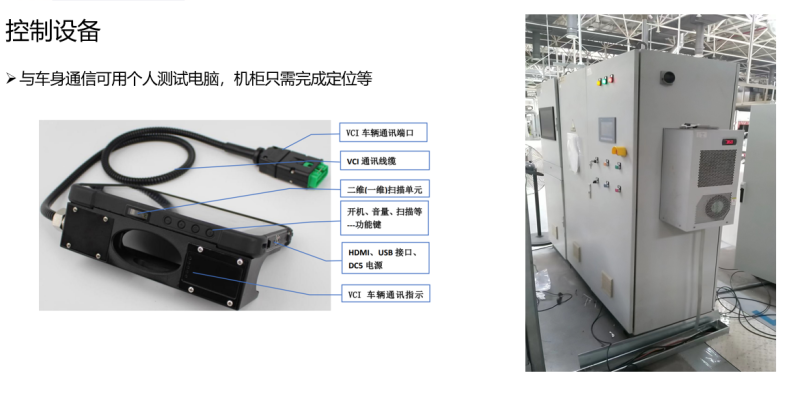
ADAS驾驶辅助设备与车载计算机之间的交互主要通过数据接口和通信协议实现。这些设备通过传感器实时收集车辆周围的环境数据,然后将这些数据通过高速数据接口传输到车载计算机。车载计算机会对这些数据进行处理和分析,利用先进的算法和模型来识别道路标志、检测障碍物、测量与前车的距离和速度等。这些信息会进一步被用来评估潜在的驾驶风险,并生成相应的控制指令。这些控制指令随后通过车载计算机的控制系统传输回ADAS设备,从而实现对车辆操作的辅助。例如,如果系统检测到即将发生碰撞,车载计算机需要会发送指令给ADAS设备,使其启动自动紧急制动功能。杭州自动驾驶辅助设备在线询价
- ADAS标定设备供应商 2024-07-11
- 湖北自动驾驶辅助设备 2024-07-11
- 梅州驾驶辅助设备厂家直销 2024-07-11
- 新疆ADAS标定设备市场报价 2024-07-11
- 宁夏先进驾驶辅助设备促销价格 2024-07-10
- 广东先进驾驶辅助设备厂家直销 2024-07-09
- 黑龙江驾驶辅助设备市场报价 2024-07-09
- 山东智能驾驶辅助设备厂家 2024-07-09
- 山东驾驶辅助设备市场报价 2024-07-09
- 江门自动驾驶辅助设备报价 2024-07-09
- 四川ADSA驾驶辅助设备定制 2024-07-08
- 辽宁驾驶辅助设备供应商 2024-07-08