- 品牌
- 上海洲和
- 型号
- 室内 室外 防爆
- 类型
- 金属探测器,火灾探测器,红外探测器,幕帘式探测器,气体探测器,手持式探测器,AI识别系统
- 加工定制
- 是
- 适用范围
- 网吧,KTV,法院,监狱,电力化工,工业园区,学校厂房,机场铁路,冶金炼钢等,铜线厂,手机厂
提高定位地图质量,定位地图中定位点不得含有草坪或其他植物,因为草坪和植物会不断生长变化,导致定位失败。对于因为环境太单调、雷同引起的定位失败,可以在失败部位张贴标志图标,避免图像太过近似引起定位失败。采用高精度北斗或GPS硬件定位。加大智能巡检机器人的电池容量,比如由1000W·h加大到2000W·h,提高续航能力,或者也可以采用高倍率充电电池提高充电速度。巡检机器人在包括能源化工、商场、园区等各个领域都有广泛的应用,但是不同的领域和场景所面临的巡检要求和应用难点也不尽相同,因此需要根据具体需求和应用场景进行定制化的设计和应用。轨道巡检机器人,就选上海洲和智能科技有限公司,欢迎客户来电!江苏农村巡检机器人定制
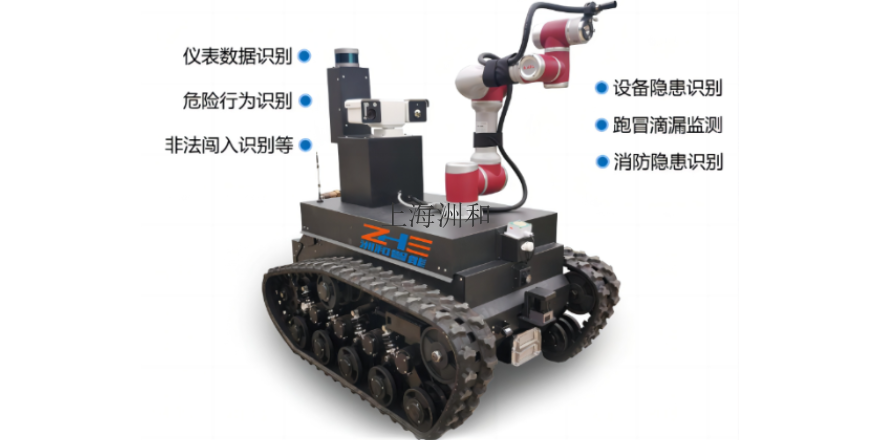
安保室内巡检机器人通常具备多种传感器和设备,如摄像头、红外线传感器、雷达、声音识别设备等,可以对周围环境进行感知和监测。这种机器人还拥有安保功能,例如监控巡逻、陌生人员报警、异常声音报警、夜间值守等。另外,一些安保巡检机器人还具备自主导航技术,可以通过自主导航技术来避开障碍物和识别路径,并使用地图和位置感知技术来确定其位置和方向。除此之外,安保巡检机器人还具有多种优势。首先,它们可以节约成本,虽然机器人的售价和维护费用高昂,但一台安保巡检机器人可以代替多个人类,并且可以24小时不停作业。其次,随着机器人技术的不断发展,机器人的成本反而会越来越低。此外,机器人还具有功能强大的优点,例如智能安保巡检机器人可以利用多种前沿技术实现各项功能,包括音视频对讲、室内无线导航、人机交互、人脸识别等。在应用领域方面,安保巡检机器人适用于多种行业,例如家庭、电商物流等。无论是在公共安全、工业设施、银行、机场等场所,还是在其他需要安保巡检的领域,这种机器人都可以得到广泛应用。总之,安保室内巡检机器人是一种具有多种优势和功能的机器人,在安保领域有着广泛的应用前景。江西智能机器巡检机器人方案设计上海洲和智能科技有限公司致力于提供煤矿巡检机器人,期待您的光临!

激光液位传感器:激光液位传感器利用激光测距原理来测量液位。巡检机器人可以装载激光发射器和接收器,向储罐内部发射激光并接收反射回来的激光。通过测量激光的传播时间和反射角度,可以计算出液位高度。重力液位传感器:重力液位传感器利用重力的原理来测量液位。巡检机器人可以装载重力传感器,通过测量储罐底部和顶部之间的重力差来计算液位高度。总的来说,巡检机器人可以通过不同类型的传感器来监测石油储罐的液位,从而保障石油化工行业的安全生产和运营。不同类型的传感器具有不同的优点和适用范围,因此在选择传感器时需要根据具体情况进行选择和配置。
上海洲和智能科技有限公司是一家在智能科技、机器人领域迅速崭露头角的新星企业,总部位于上海。公司的研发团队由来自上海复旦大学的机器人专业老师和来自工业安全仪表领域的行业专业老师组成,他们在机器人技术、人工智能及安全仪表领域具有深厚的专业知识和丰富的实践经验。在电力巡检行业,比如变电站、室内挂轨、智慧管廊等环境,均有相应的巡检机器人应用。在电力巡检行业的产品包括变电站智能巡检机器人,以及室内挂轨智能巡检机器人、智慧管廊巡检机器人等。我公司根据不同环境及应用需求,研发了不同型号的巡检机器人,各有其特点及优势。总的来说,巡检机器人在各类复杂环境中的应用越来越广,发挥着越来越重要的作用。上海洲和智能科技有限公司致力于提供煤矿巡检机器人,欢迎新老客户来电!

电量检测:由于电池在放电过程中伴随电量的减少其带负载输出电压会下降较为明显,所以通过数字量化输出电压就能实现对电池其余电量的成功估计。但考虑到利余电量与带载输出电压两者间并非线性关系,因此通过这样的方法来估计得到的结果并不一定准确,所以考虑预先对电池负载放电特性加以估计和测定,以使所获得的电池电压值变得更加准。升降云台:主要采用分布式控制的方式来控制垂直升降云台的运动。驱动器以及电机都将被配备控制器,在充分考虑成本的情况下对其予以模块化设计。而控制器内部将做到电机的闭环控制,把编码器所反馈的角度信息读取到以后作为反馈信号,从而借此实现对电机控制执行值的计算。其中水平控制单元主要负责水平方向的旋转,而重直升降单元将主要负责垂直方向的运动。分立的控制单元将作为从设备挂载于中枢控制器的CAN总线,在实现对电机单独控制的同时还可借助中枢控制器将相关协调工作做好。上海洲和智能科技有限公司为您提供AI巡检机器人,欢迎新老客户来电!辽宁自主研发巡检机器人定制
上海洲和智能科技有限公司致力于提供轨道巡检机器人,有需求可以来电咨询!江苏农村巡检机器人定制
智能巡检机器人实现自主导航的方式如下:基于SLAMTEC自主定位导航套装,由高性能激光雷达RPLIDAR与定位导航控制SLAMWARE构成,机器人可以实现自主定位、自动建图、路径规划与自动避障。通过内置激光探头对周围环境进行360度扫描,并获得周边环境的轮廓信息。将环境轮廓信息与之前已经建立的信息图进行匹配,从而使机器人实现准确的定位导航。构建周围环境的地图,精确定位自己在地图中的位置。然后根据地图进行路径规划控制自己完成移动。在移动的过程中,机器人还需要根据现场环境的动态变化,实时躲避障碍物直至到达终目标点。江苏农村巡检机器人定制

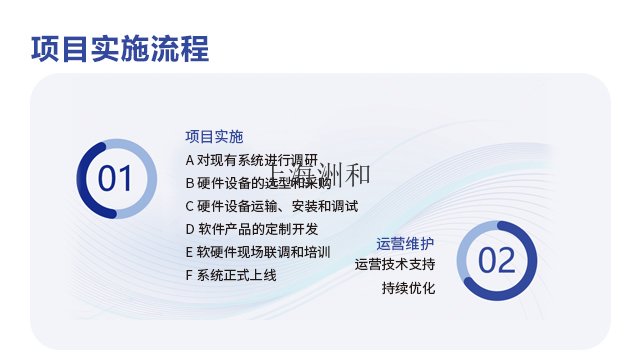
巡检机器人行业商业模式分析在巡检机器人行业中,“本体生产+系统集成”模式是当下的发展趋势,也是当前具备较高盈利水平的商业模式。这种商业模式要求企业不仅具备机器人本体的生产能力,还需要具备系统集成的能力,能够根据客户的需求进行定制化开发,提供完整的解决方案。目前国内外较为成功的企业都采用了“本体生产+系统集成”的全产业链模式,或是正在向上下游逐步渗透,实现全产业链模式的转型。这种模式的优势在于可以整合上下游资源,提高产业链的协同效应,降低成本,提高竞争力。同时,企业还可以根据市场需求和技术发展趋势,不断调整和优化产业链布局,实现可持续发展。在“本体生产+系统集成”模式中,企业可以通过技术创新和品...
- AI巡检机器人施工方案 2024-12-01
- 陕西室外巡检机器人方案 2024-12-01
- 广东电力巡检机器人厂家 2024-11-30
- 宁夏煤矿巡检机器人价格 2024-11-30
- 江西煤矿巡检机器人报价 2024-11-30
- 浙江巡检机器人物联网系统 2024-11-30
- 广东农村巡检机器人施工方案 2024-11-30
- 山东智能机器巡检机器人造价 2024-11-30
- 云南AI巡检机器人造价 2024-11-30
- 浙江智能机器巡检机器人物联网系统 2024-11-30


- 福建自主研发巡检机器人施工方案 2024-11-30
- 青海冶金巡检机器人定制 2024-11-30
- 江苏煤矿巡检机器人工程 2024-11-30
- 江苏巡检机器人方案 2024-11-30
- 山西室内巡检机器人物联网系统 2024-11-30
- 青海自主研发巡检机器人施工方案 2024-11-30


- 上海油阀远程控制仪哪家好 12-01
- 机房巡检机器人厂家报价 12-01
- 青浦区特种机器人 12-01
- AI巡检机器人施工方案 12-01
- 油阀智能控制系统厂商 12-01
- 陕西室外巡检机器人方案 12-01
- 浙江机房巡检机器人哪家好 12-01
- 广东电力巡检机器人厂家 11-30
- 宁夏煤矿巡检机器人价格 11-30
- 江西煤矿巡检机器人报价 11-30