伺服电缸的发展趋势主要体现在以下几个方面:高精度:随着工业自动化和智能制造的发展,对伺服电缸的精度要求越来越高。未来,伺服电缸将通过改进制造工艺、提高零部件加工精度、优化控制系统等方式,进一步提高其定位精度和重复定位精度,以满足高精度设备的需求。高速率:在某些需要高速运动的场合,伺服电缸需要具备更高的响应速度和更高的动态性能。未来,伺服电缸将通过优化设计、减轻重量、减小转动惯量等方式,进一步提高其响应速度和动态性能,以满足高速运动控制的需求。大负载:随着工业自动化和智能制造的发展,伺服电缸需要承载更大的负载。未来,伺服电缸将通过采用新材料、优化结构设计、提高承载能力等方式,进一步提高其承载能力,以满足大负载设备的需求。模块化与智能化:伺服电缸将实现模块化和智能化,使其能够适应更多的应用场景和更复杂的控制要求。例如,伺服电缸可以通过集成传感器和执行器,实现自感知、自适应、自调整等功能,提高其智能化水平和适应性。节能环保:随着环保意识的提高,伺服电缸将更加注重节能环保。未来,伺服电缸将通过采用高效电机、优化减速机构、降低摩擦和振动等方式,进一步降低能耗和减少噪音,以满足节能环保的要求。电缸的行程长度可以根据需求定制。湖南进口电缸
电缸的模块化闭环伺服控制系统通过多种方式实现高精度控制,主要包括以下几个方面:高精度伺服电机和控制器:选择具有高分辨率和低齿隙的伺服电机,以及具有高速动态响应和高控制精度的控制器,是实现高精度控制的基础。闭环控制:采用位置、速度和力矩闭环控制,对电缸的实际位置、速度和力矩进行实时监测和反馈,不断调整控制信号,以保证运动的稳定性和精度。精密传动机构:采用精密滚珠丝杠、线性滑轨等传动机构,减小机械误差,提高电缸的定位精度和重复定位精度。温度控制:采用温度传感器和加热器等装置,对电缸进行温度补偿和控制,减小温度对电缸性能的影响。防干扰措施:采取一系列防干扰措施,如电磁屏蔽、噪声抑制等,减小电气噪声对控制系统的影响,保证控制的稳定性和精度。参数优化:通过对控制参数进行优化,如PID参数调整、滤波器设置等,提高控制的动态性能和稳态精度。校准和调试:对电缸进行精确的校准和调试,确保电缸在实际工作中能够达到设计要求的精度。 上海哪里有电缸电缸的输出力取决于其设计和电机功率。

高精度化:随着工业自动化水平的提高,对电缸的精度要求也越来越高。高精度电缸能够实现更精确的位置控制和更稳定的速度调节,因此在装备制造、精密加工等领域有着广泛的应用前景。智能化:智能化是电缸未来发展的重要方向之一。通过引入传感器、控制器等智能元件,电缸可以实现自适应控制、自主学习等功能,进一步提高电缸的性能和智能化水平。模块化与组合化:为了满足不同领域和不同应用场景的需求,电缸正朝着模块化与组合化的方向发展。通过模块化和组合化设计,电缸可以更加灵活地适应不同的安装和使用环境,并且便于维护和升级。高速化与高效率:为了提高生产效率和加工质量,电缸正朝着高速化与高效率的方向发展。通过优化电机、传动系统等部件,提高电缸的响应速度和运动效率,从而实现更快速、更高效的生产线运行。绿色环保:随着环保意识的提高,电缸的发展也必须符合绿色环保的要求。电缸的制造和使用过程中应尽量减少对环境的影响,例如采用环保材料、优化设计等措施,推动电缸行业的可持续发展。新技术的应用:随着新技术的发展,电缸的应用领域和市场将进一步拓展。例如,在人工智能、物联网等新兴技术的推动下,电缸将能够实现更加智能、自主的控制和管理。
伺服电缸在光伏行业的实际应用主要体现在以下几个方面:精确控制:伺服电缸具有高精度、高稳定性的特点,能够实现对光伏设备的精确控制。在光伏板受到阴影、云雾等因素的影响时,伺服电缸可以快速响应,并实现精确定位,确保光伏板的正常发电。适应不同地域:不同地域的环境条件不同,如果光伏设备不能根据环境条件进行适应性调节,将会影响其发电效率。伺服电缸可以根据控制器的作用,迅速响应环境变化,实现对光伏设备旋转的及时调整和精确控制,确保其适应不同地域的环境条件,提高光伏设备的发电效率。降低能耗:伺服电缸可以根据光伏设备发电的需求,实现电机的自适应控制。在光伏设备处于低负荷、不需要旋转的状态时,伺服电缸自动调整功率,降低能耗,提高光伏设备的能效比。跟踪系统应用:伺服电缸在光伏跟踪系统中也有广泛应用。地面式光伏发电的光伏面板可以通过跟踪阳光的位置来提升光电转换效率。而此时就需要用到伺服电缸。伺服电缸作为一种电动执行器,可以实现角度控制,用于驱动光伏跟踪系统中的转动部件,使太阳能光线垂直于光伏面板,从而提升光电转换效率。综上所述,伺服电缸在光伏行业中具有广泛的应用前景。 电缸提升了农业机械的自动化水平。
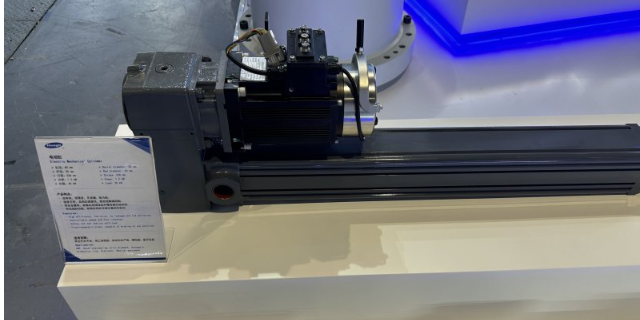
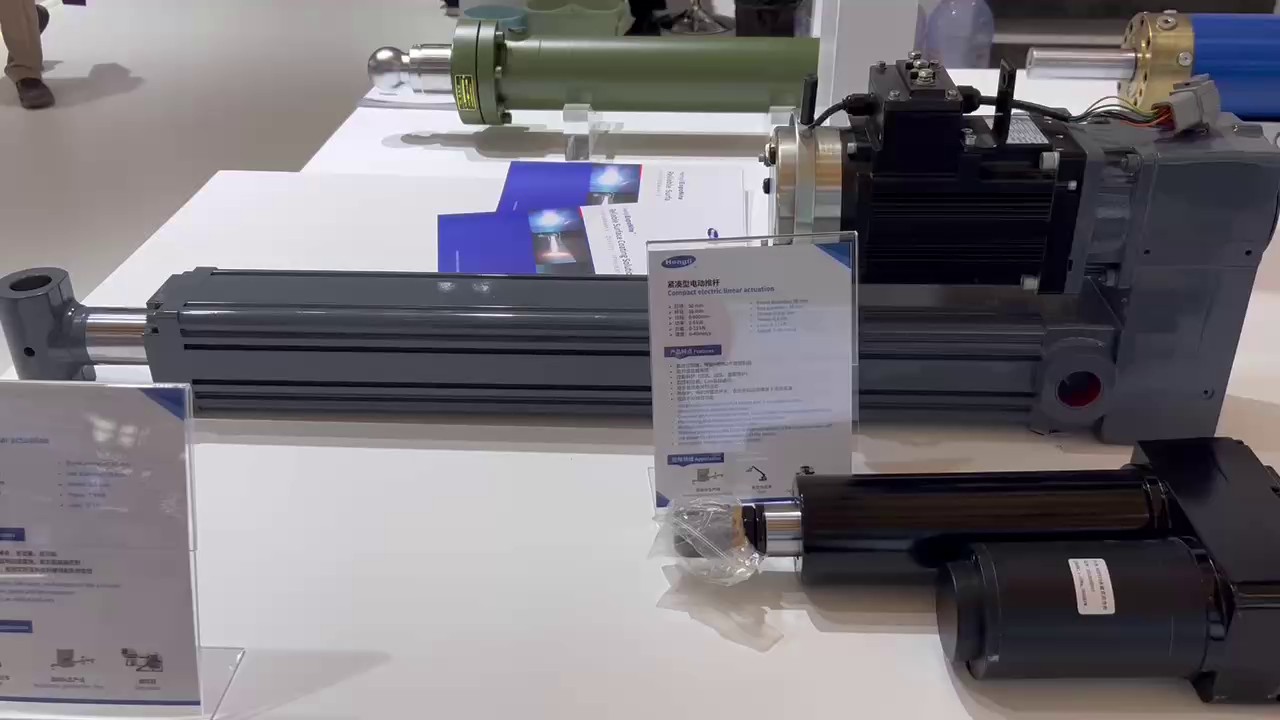
电缸的直线运动功能是通过其内部结构和传动机制实现的。电缸的内部主要包括电动机、丝杠或螺母、滑块和导轨等部件。当电动机通过联轴器与丝杠或螺母连接时,电动机的旋转运动被转换为丝杠或螺母的直线运动。同时,滑块与丝杠或螺母配合,通过导轨的导向作用,实现了滑块的直线运动。具体来说,当电动机通电后,转子开始旋转,通过联轴器将旋转运动传递给丝杠或螺母。丝杠或螺母在旋转过程中,由于螺旋结构的存在,使得滑块沿着导轨做直线往复运动。这种运动方式可以实现高精度、高速度和高负载的直线运动,因此在工业自动化生产中具有广泛的应用价值。此外,电缸的传动方式也可以根据实际需求进行选择。例如,滚珠丝杠传动是一种常用的传动方式,其优点在于传动效率高、定位精度高、可靠性好等。而行星滚柱丝杠传动则具有更高的承载能力和更高的传动效率,适用于大负载、高精度的场合。总之,电缸的直线运动功能是通过其内部结构和传动机制共同实现的。通过选择合适的传动方式和电缸型号,并进行正确的安装和维护,可以保证电缸的性能和稳定性,从而实现高精度、高速度和高负载的直线运动。 电缸的推力输出不受环境温度影响。江苏电缸控制
电缸在工业自动化中扮演着重要角色。湖南进口电缸
工业机器人中,电缸通过其机械结构和电动机系统共同实现线性运动控制。具体来说,电缸的线性运动控制过程如下:控制器:工业机器人的控制器根据编程指令和反馈信息计算出机器人所需的运动轨迹和马达控制信号,以确保机器人按照指定的轨迹和速度进行线性运动。伺服马达:伺服马达是电缸的重要驱动组件,能够将电能转化为机械能。通过控制器发出的指令,伺服马达驱动电缸进行线性运动。编码器:编码器用于反馈电机的实时位置信息,控制器根据编码器的反馈信息计算出机器人实际位置与目标位置的偏差,并调整控制信号以纠正偏差,实现闭环控制。传动机构:传动机构包括齿轮箱和滑块等部件,用于将伺服马达的转速转化为电缸所需的扭矩,并将扭矩传递到滑块上,推动滑块在导轨上做线性运动。导轨:导轨是电缸的支撑和导向部件,确保滑块沿指定轨迹进行线性运动。导轨通常由精密的钢制零件制成,以确保高精度和长寿命。滑块:滑块是电缸的执行部件,由具有低摩擦和高耐磨性的材料制成,如高分子材料和金属等。滑块与导轨的配合实现了电缸的线性运动。综上所述,工业机器人中的电缸通过其机械结构和电动机系统的协同作用,实现了精确的线性运动控制。 湖南进口电缸