据两者关系判断出它的变化方 向,从而产生‘正向’或‘反向’输出脉冲。当某道由于振动在‘高’、‘低’间往复变化 时,将交替产生‘正向’和‘反向’脉冲,这在对两个计数器取代数和时就可消除它们的影响(下面仪器的读数也将涉及这点)。由此可见,时钟发生器的频率应大于振动频率的可能 最大值。由图4还可看出,在原一个脉冲信号的周期内,得到了四个计数脉冲。例如,原每圈脉冲数为1000的编码器可产生4倍频的脉冲数是4000个,其分辨率为0.09°。实际上 ,目前这类传感器产品都将光敏元件输出信号的放大整形等电路与传感检测元件封装在一起,所以只要加上细分与计数电路就可以组成一个角位移测量系统(74159是4-16译码器)。经过在实际应用效果来看,完全可以代替多圈编码器从而达到既实现了功能,又节约了成本的效果。广东MAR-M50A编码器代理

件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以零位参考位。由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。湖北MAR-M50A编码器费用是多少近年来对于应用中外接电池这样的设计,客户希望通过“无电池编码器”的方案进行对应的需求不断增加。

机器人无处不在的社会支持制造业的工业机器人伴随工业制造升级,必将进一步发展。迄今为止,从安全方面来看作为机器人类型之一是在装配工作和运输过程中,与人类在同一空间中协同工作的“协作机器人”。,人类和机器人一直在完全隔离的环境中工作,但作为解决未来劳动力短缺和多品种小批量生产等生产问题的手段,协作机器人可以满足这样的需求,帮助人类在人机共存的应用场景中发挥作用。因此,协作机器人正在逐步引起人们的关注,并在更多的领域被投入适用。
绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是: 1.2.1可以直接读出角度坐标的绝对值; 1.2.2没有累积误差; 1.2.3电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数,目前有10位、14位等多种。常应用于转台装置和多轴机器人的的前端轴位,为机械装置设计的灵活度和减少体积提供了可能性。
电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对值编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。通常,绝对式编码器的码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是:可以直接读出角度坐标的绝对值;没有累积误差;机器人适用于多种生活场景:观察周围客服机器人、宠物机器人、人形机器人等,各种机器人常出现在我们身边。广西SAR-ML50A编码器代理
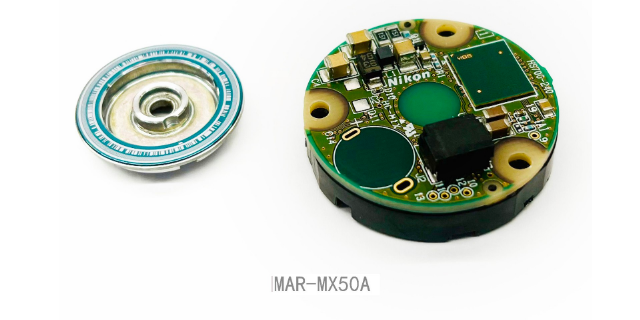
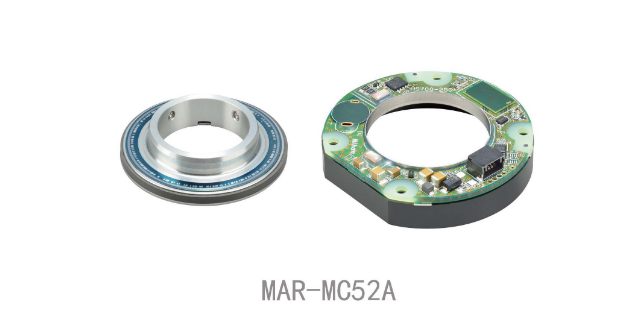
从1992年起,尼康以“开发机器人制造商想要的编码器”为方针,不断积累技术并提高市场的可靠性。广东MAR-M50A编码器代理
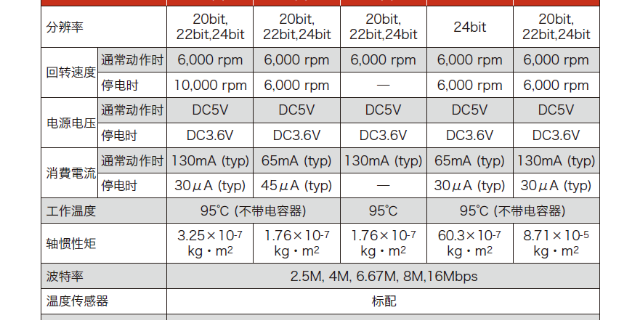
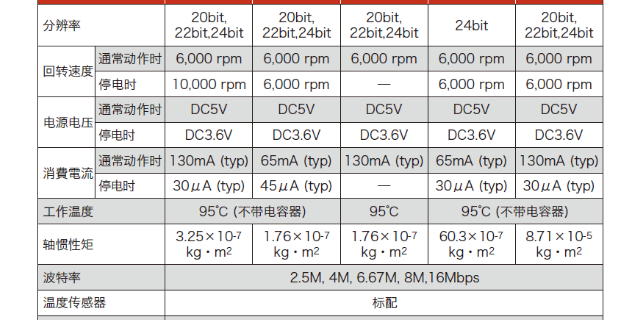
允许在同一接线上连接多个编码器,提高接线空间的效率。Nikon编码器采用两路全串行通讯“NikonA-format”。配备双向全串行通信“NikonA-format”,可用4条线连接实现控制器和编码器之间进行通信。通过与传统机型共享通信格式,可以扩大客户的电机选择范围。Nikon编码器沿用其自主创建的M-sequence的绝对图案技术和良好的光学设计,实现了蕞高分辨率为每圈24位(2的24次方:16,777,216线/圈)的高分辨率。可以进行精确定位,也有助于提高速度控制的稳定性。还可以支持“总线连接(蕞多8台)”,广东MAR-M50A编码器代理