(二)改进措施1.改变光电编码器的安装方式。光电编码器不在安装在电动机外壳上,而是在电动机的基础上制作一固定支架来安装光电编码器,光电编码器轴与电动机轴中心必须处于同一水平高度,两轴采用软橡胶或尼龙软管相连接,以减轻电动机冲击负载对光电编码器的机械冲击。采用此方式后经测振仪检测,其振动速度降至1.2mm/s。2.合理选择光电检测装置输出信号传输介质,采用双绞屏蔽电缆取代普通屏蔽电缆。双绞屏蔽电缆具有两个重要的技术特性,一是对电缆受到的电磁干扰具有较强的防护能力,因为空间电磁场在线上产生的干扰电流可以互相抵消。双绞屏蔽电缆的另一个技术特点是互绞后两线间距很小,两线对干扰线路的距离基本相等,两线对屏蔽网的分布电容也基本相同,这对抑制共模干扰效果更加明显。它采用闭环反馈系统,通过电子控制器对电机进行精细控制,从而实现高速、高精度、高可靠性的运动控制.整体式编码器调试安装

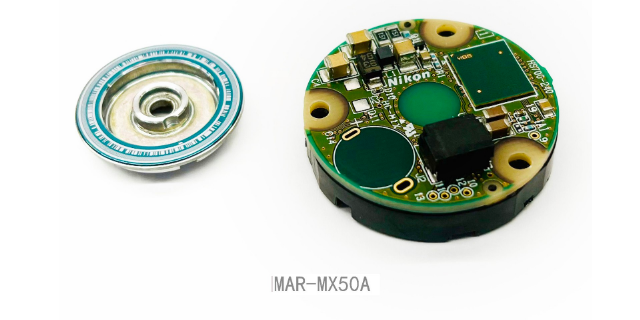
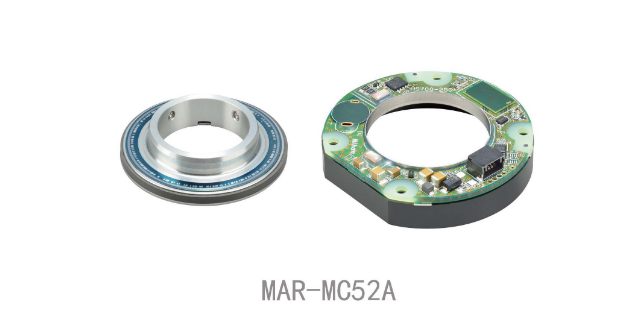
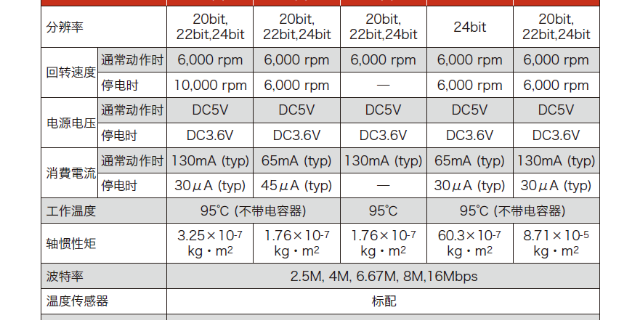
可同时获取编码器位置数据和温度数据。高温对应:工作温度上限可达95℃(双重电气电压搭载除外)。·通过磁石元器件检出多圈数。·断电时电池的消费电流极小。即使在马达轴运转的情况下,电池的消费流量也保持一定。·电池寿命可计算。·编码器内部始终在比较来自两个不同传感器的数据。从而,当编码器检出某处潜在故障时,会以错误表示的形式反馈给上位控制器,对装置或马达的失控起到防患于未然的作用。·磁气式多圈适用于小型AC伺服电机,小型机械臂,机器人使用的电机。分体磁气式多圈绝对值编码器:M50A分辨率(可选):20bit、22bit、24bit温度传感器:标配。北京MAR-M50A编码器哪里有卖工业自动控制工程中需要通过电信号来加以处理,编码器便是实现这一功能的**主要设备。
编码器工作原理 冲编码器:APC 增量脉冲编码器:SPC 两者一般都应用于速度控制或位置控制系统的检测元件. 旋转编码器是用来测量转速的装置。它分为单路输出和双路输出两种。技术参数主要有每转脉冲数(几十个到几千个都有),和供电电压等。单路输出是指旋转编码器的输出是一组脉冲,而双路输出的旋转编码器输出两组相位差90度的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。 增量型编码器与编码器的区分 编码器如以信号原理来分,有增量型编码器。 增量型编码器 (旋转型)
但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数。通常,绝对式编码器的码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对值编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是:可以直接读出角度坐标的绝对值;没有累积误差;电源切除后位置信息不会丢失。它有助于设备和电机的精确和高速控制。通过与以往机型共用,扩大客户的电机选择范围。

光电编码器原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器,是目前应用多的传感器。一般的光电编码器主要由光栅盘和光电检测装置组成。在伺服系统中,由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转.经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理如图所示。通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90°的2个通道的光码输出,根据双通道光码的状态变化确定电机的转向。根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式3种。无需调节信号,使用尼康独有的光学 技术,允许更大的光学间隙变动和轴 向跳动,产品更可靠。整体式编码器种类及型号
机器人适用于多种生活场景:观察周围客服机器人、宠物机器人、人形机器人等,各种机器人常出现在我们身边。整体式编码器调试安装
电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对值编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。通常,绝对式编码器的码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是:可以直接读出角度坐标的绝对值;没有累积误差;整体式编码器调试安装