件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以零位参考位。由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。绝对型编码器又可分为单圈编码器和多圈编码器。浙江MAR-M50A编码器有几种型号

已被机器人、高性能双足步行机器人等主要机器人制造商采用,并被各大汽车制造商指定为机器人设备的编码器。2007年发布了可以说是当前编码器事业基石的绝对值编码器“MAR-M40系列”,2014年成立编码器事业部。尼康在去年5月公布的中期经营计划(Chukei)中,重点关注机器人领域。上海科姆特自动化控制技术有限公司提供。未来机器人行业的需求基础将扩大。尼康的机器人模块业务也准备扩大其基础。从1992年起,尼康以“开发机器人制造商想要的编码器”为方针,不断积累技术并提高市场的可靠性。安徽尼康编码器哪家质量好M 序列以一个码道模式生成绝对值数据,并且有格雷码模式所无法实现的紧凑和高可靠性。
编码器原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
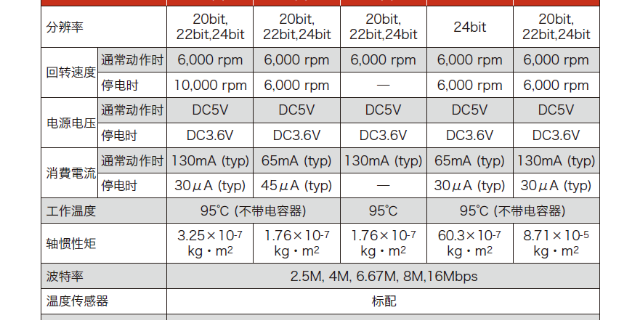
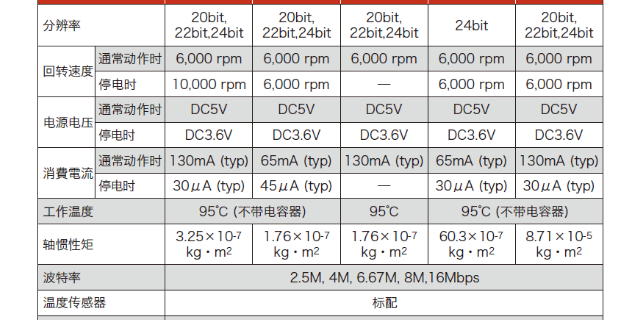
可同时获取编码器位置数据和温度数据。高温对应:工作温度上限可达95℃(双重电气电压搭载除外)。·通过磁石元器件检出多圈数。·断电时电池的消费电流极小。即使在马达轴运转的情况下,电池的消费流量也保持一定。·电池寿命可计算。·编码器内部始终在比较来自两个不同传感器的数据。从而,当编码器检出某处潜在故障时,会以错误表示的形式反馈给上位控制器,对装置或马达的失控起到防患于未然的作用。·磁气式多圈适用于小型AC伺服电机,小型机械臂,机器人使用的电机。分体磁气式多圈绝对值编码器:M50A分辨率(可选):20bit、22bit、24bit温度传感器:标配。增量式编码器由具有均匀间隔的光栅来向控制器发送脉冲。
路用1个D触发器和2个与非门组成,计数电路用3片74LS193组成当光电编码器顺时针旋转时,通道A输出波形超前通道B输出波形90°,D触发器输出Q(波形W1)为高电平,Q(波形W2)为低电平,上面与非门打开,计数脉冲通过(波形W3),送至双向计数器74LS193的加脉冲输入端CU,进行加法计数;此时,下面与非门关闭,其输出为高电平(波形W4)。当光电编码器逆时针旋转时,通道A输出波形比通道B输出波形延迟90°,D触发器输出Q(波形W1)为低电平,Q(波形W2)为高电平,上面与非门关闭,其输出为高电平(波形W3);此时,下面与非门打开,计数脉冲通过(波形W4),送至双向计数器74LS193的减脉冲输入端CD,进行减法计数。如果过程需要位置数据,则编码器可以向控制器发送电脉冲,以确定电机在其边界区域内的位置。江苏尼康编码器代理
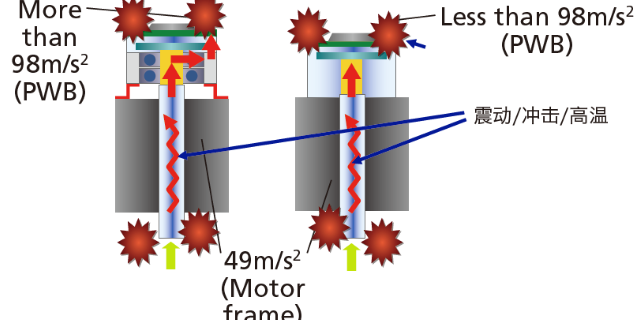
Nikon 分体绝对值编码器 M50A系列 体积小、安装简单。 分体式的构造,减少了震动/冲击/高温,对PCB板的影响。浙江MAR-M50A编码器有几种型号
一、光电编码器的工作原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90o的两路脉冲信号。浙江MAR-M50A编码器有几种型号