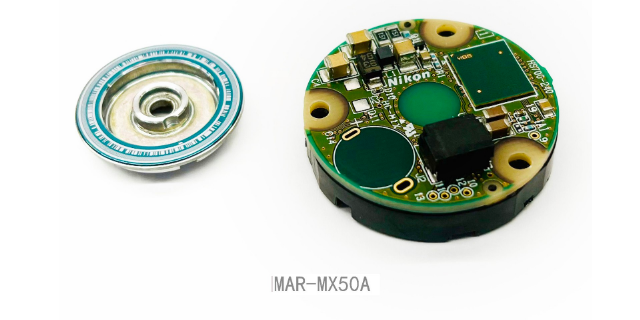
但作为解决未来劳动力短缺和多品种小批量生产等生产问题的手段,协作机器人可以满足这样的需求,帮助人类在人机共存的应用场景中发挥作用。因此,协作机器人正在逐步引起人们的关注,并在更多的领域被投入适用。作为机器人类型之一是在装配工作和运输过程中,与人类在同一空间中协同工作的“协作机器人”。机器人无处不在的社会支持制造业的工业机器人伴随工业制造升级,必将进一步发展。迄今为止,从安全方面来看,人类和机器人一直在完全隔离的环境中工作,这款产品的应用年限也是非常长久的,不管打算应用在怎样的领域中都可以满足各方面的需要。MAR-M50A编码器有几种型号
,将其中线路一定义为A,另线路二定义为B。通常情况下,发送驱动器A、B之间的正电平在+2~+6V,是一个逻辑状态,负电平在-2~-6V,是另一个逻辑状态。尼康编码器使用半双工串行通信(RS-485标准),RS-485与RS-232、RS-422都是串行数据接口标准,蕞初都是由电子工业协会(EIA)制订并发布的。RS-485可以采用二线制实现真正的多点双向通信。尼康编码器的串行通信速率从2.5Mbps至16Mbps,以满足高速、高精度的应用需求。RS-485数据信号采用差分传输方式,也称作平衡传输,它使用一对双绞线山东Nikon编码器应用领域编码器利用光栅衍射原理实现位移-数字变换,通过光电转换,将输出轴上的机械几何位移量转换成脉冲数字量。
电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对值编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。通常,绝对式编码器的码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是:可以直接读出角度坐标的绝对值;没有累积误差;
一、光电编码器的工作原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90o的两路脉冲信号。光敏元件接收的光通量随透光线条同步变化,光敏元件输出波形经整形后,变为脉冲信号。

当码盘转动时,它的输出信号是相位差为90°的A相和B相脉冲 信号以及只有一条透光狭缝的第三码道所产生的脉冲信号(它作为码盘的基准位置,给计数系统提供一个初始的零位信号)。从A,B两个输出信号的相位关系(超前或滞后)可判断旋转的方向。当码盘正转时,A道脉冲波形比B道超前π/2,而反转时 ,A道脉冲比B道滞后π/2。是一实际电路,用A道整形波的下沿触发单稳态 产生的正脉冲与B道整形波相‘与’,当码盘正转时只有正向口脉冲输出,反之,只有逆向口脉冲输出。因此,增量编码器是根据输出脉冲源和脉冲计数来确定码盘的转动方向和相对角位移量。通常,若编码器有N个(码道)输出信号,其相位差为π/ N,可计数脉冲为2N倍光栅数,现在N=2。电路的缺点是有时会产生误记脉冲造成误差,编码器是一种将旋转位移转换成一串数字脉冲信号的旋转式传感器。广西MAR-MX50A编码器代理
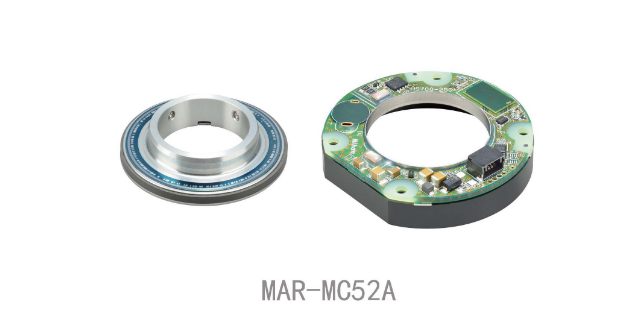
分体单圈绝对值编码器:SAR-ML50A · 去掉了多圈功能以降低成本。MAR-M50A编码器有几种型号
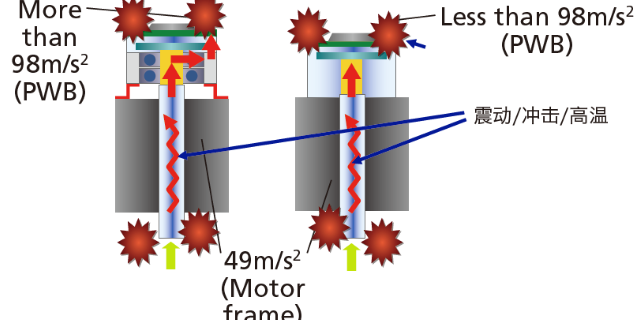
光电检测装置的发射和接收装置都安装在生产现场,在使用中暴露出许多缺陷,其有内在因素也有外在因素,主要表现在以下几个方面:1.发射装置或接受装置因机械震动等原因而引起的移位或偏移,导致接收装置不能可靠的接收到光信号,而不能产生电信号。例如;光电编码器应用在轧钢调速系统中,因光电编码器是直接用螺栓固定在电动机的外壳上,光电编码器的轴通过较硬的弹簧片和电动机转轴相连接,因电动机所带负载是冲击性负载,当轧机过钢时会引起电动机转轴和外壳的振动MAR-M50A编码器有几种型号