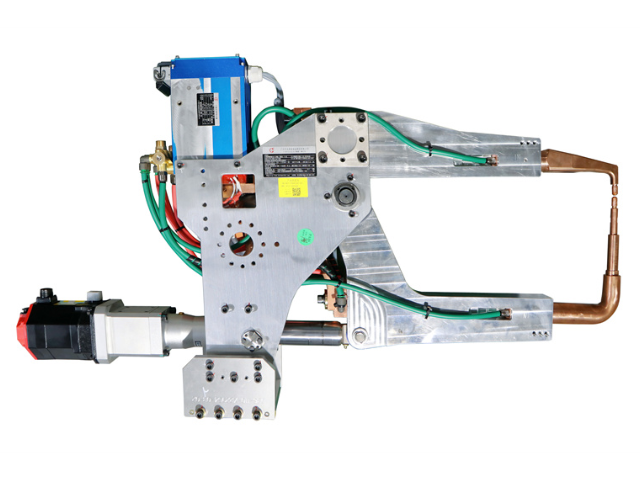
机器人焊钳是一种自动化焊接设备,由机器人手臂和焊钳组成。焊钳是机器人焊接的关键部件,它的结构设计直接影响到焊接质量和效率。机器人焊钳的结构通常包括以下几个部分:1.夹持器:夹持器是焊钳的主要部件,用于夹持焊接工件。夹持器通常由两个夹爪组成,夹爪之间的距离可以根据焊接工件的大小进行调整。2.电极:电极是焊接时传递电流的部件,通常由铜制成。电极的形状和大小可以根据焊接工件的形状和大小进行设计。3.冷却系统:焊接时会产生大量的热量,需要通过冷却系统来降温。冷却系统通常由水冷或气冷组成。4.传感器:传感器用于检测焊接工件的位置和形状,以便机器人可以准确地夹持焊接工件和进行焊接。5.控制系统:控制系统用于控制机器人焊钳的运动和焊接参数,包括焊接电流、焊接速度、焊接时间等。总之,机器人焊钳的结构设计需要考虑到焊接工件的形状和大小,以及焊接质量和效率的要求。通过合理的结构设计和控制系统,机器人焊钳可以实现高效、精确、稳定的自动化焊接。机器人焊钳采用先进的自动化技术,能够实现高质量的焊接效果。河北点焊机器人焊钳电路图
机器人焊钳的焊接速度是可以调节的。焊接速度是指焊接过程中焊接头的移动速度,它直接影响到焊接质量和效率。机器人焊钳的焊接速度可以通过控制焊接机器人的运动速度来实现。在焊接过程中,可以通过调整机器人的运动速度来控制焊接速度,以达到更佳的焊接效果。同时,还可以通过调整焊接电流和电压等参数来进一步控制焊接速度和焊接质量。不同的焊接任务需要不同的焊接速度,因此在实际应用中需要根据具体情况进行调节。总之,机器人焊钳的焊接速度是可以调节的,通过合理的调节可以实现高效、高质量的焊接。石家庄机器人焊钳价格机器人焊钳能够实现多种焊接方式,包括点焊、拖焊、搭接焊等。

机器人焊钳的焊接效率可以通过以下几个方面来提高:1.优化焊接程序:通过优化焊接程序,可以使机器人焊钳的焊接速度更快、更稳定。例如,可以调整焊接速度、电流、电压等参数,以达到更佳的焊接效果。2.提高机器人的精度:机器人的精度越高,焊接的准确性就越高,从而可以提高焊接效率。可以通过更换更精确的传感器、提高机器人的控制精度等方式来提高机器人的精度。3.优化工作环境:机器人焊钳的工作环境对其焊接效率也有很大的影响。例如,可以优化焊接工作区域的照明、通风等条件,以提高机器人的工作效率。4.使用更高效的焊接设备:使用更高效的焊接设备可以提高机器人焊钳的焊接效率。例如,可以使用更高功率的焊接机、更快速的焊接头等设备,以提高焊接速度和效率。5.优化焊接材料:选择更适合机器人焊钳的焊接材料,可以提高焊接效率。例如,可以选择更容易焊接的材料,或者使用更高效的焊接材料,以提高焊接效率。
机器人焊钳对提高产品质量有很大的影响。首先,机器人焊钳可以提高焊接的精度和一致性。机器人焊钳可以精确地控制焊接的位置、速度和力度,从而确保焊接的质量和一致性。这可以减少焊接缺陷的数量,提高产品的质量。其次,机器人焊钳可以提高生产效率和生产速度。机器人焊钳可以在短时间内完成大量的焊接任务,从而提高生产效率和生产速度。这可以减少生产时间和成本,提高产品的生产效率和竞争力。除此之外,机器人焊钳可以提高工作环境的安全性。机器人焊钳可以在危险的环境中工作,如高温、高压、有毒气体等环境中。这可以减少工人的伤害和事故,提高工作环境的安全性。综上所述,机器人焊钳对提高产品质量有很大的影响。它可以提高焊接的精度和一致性,提高生产效率和生产速度,提高工作环境的安全性。这可以帮助企业提高产品的质量和竞争力,从而获得更多的市场份额和利润。机器人焊钳的操作过程中,能够实现数据记录和分析,为生产管理提供依据。
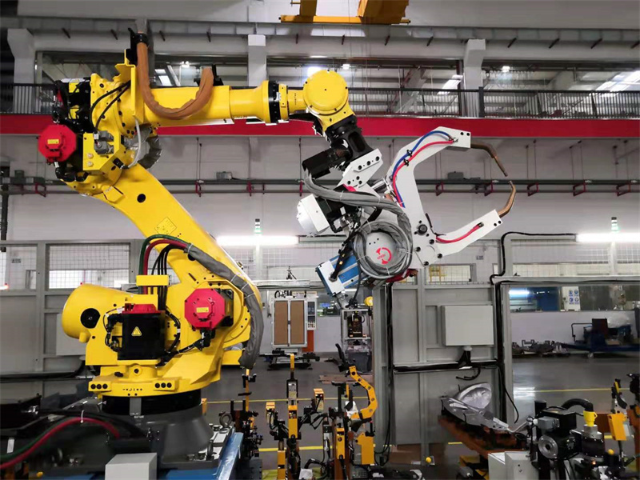
机器人焊钳的操作原理是通过程序控制机器人的动作,将焊钳移动到需要焊接的位置,然后进行焊接操作。机器人焊钳通常由机器人手臂、焊钳、焊接电源、控制系统等组成。首先,机器人手臂会根据程序指令移动到需要焊接的位置,然后焊钳会夹住需要焊接的工件。接着,焊接电源会提供所需的电流和电压,将焊接材料加热至熔化状态,使其与工件融合在一起。焊接完成后,机器人手臂会将焊钳移开,完成一次焊接操作。机器人焊钳的操作原理主要依赖于程序控制和自动化技术,可以实现高效、精确的焊接操作,提高生产效率和产品质量。同时,机器人焊钳还具有安全、稳定、可靠等优点,可以在恶劣环境下进行焊接操作,减少人工干预,降低劳动强度和安全风险。机器人焊钳的控制系统稳定可靠,能够保证设备的长期稳定运行。河北点焊机器人焊钳电路图
机器人焊钳的操作过程中能够实现实时监控和数据记录,方便后续的数据分析和优化。河北点焊机器人焊钳电路图
机器人焊钳在焊接过程中可以通过调整焊接参数来应对不同的材料和厚度。首先,机器人焊钳需要根据焊接材料的种类和厚度选择合适的焊接电流、电压、焊接速度等参数。对于较薄的材料,机器人焊钳可以采用较小的电流和速度,以避免过度加热和变形。对于较厚的材料,机器人焊钳需要采用较大的电流和速度,以确保焊接质量和焊缝的牢固性。此外,机器人焊钳还可以通过使用不同的焊接头和焊接材料来适应不同的材料和厚度。例如,对于不同种类的钢材,机器人焊钳可以选择不同种类的焊接头和焊接材料,以确保焊接质量和焊缝的牢固性。同时,机器人焊钳还可以根据焊接材料的特性和要求,选择不同的焊接方式,如MIG焊、TIG焊等,以满足不同的需求。河北点焊机器人焊钳电路图
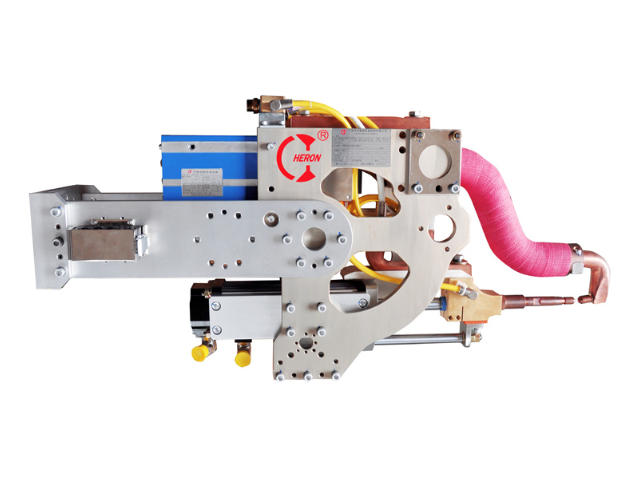
而机器人焊钳采用先进的冷却技术,能够快速带走焊接时产生的热量,防止铝合金材料过度受热变形。同时,...
【详情】机器人焊钳是我们公司的**产品,具有以下特点:1.高精度:能够实现精确的焊接,确保焊接质量。2.高效...
【详情】机器人焊钳是一种高效、精细、可靠的焊接工具,具有以下优点:1.提高生产效率:机器人焊钳能够快速、准确...
【详情】从工作原理看,机器人焊钳实现高效焊接有着独特的机制。机器人焊钳主要由机械结构、电气控制和焊接组件构成...
【详情】#机器人焊钳工作原理对焊接质量的影响 机器人焊钳作为自动化焊接领域的**设备,其工作原理深...
【详情】在现代焊接领域,机器人焊钳与传统焊钳各自有着独特的工作原理,这些差异决定了它们在不同场景下的应用...
【详情】机器人焊钳相比传统焊接工艺,具有高效、精细、稳定等优点。它可以实现高精度的焊接,提高焊接质量和效率,...
【详情】在操作机器人焊钳时,需要注意以下几点:1.编程:根据焊接工艺和工件形状,编写合适的焊接程序,并将程序...
【详情】机器人焊钳是一种用于机器人焊接系统的工具,它可以精确地控制焊接位置和焊接参数,提高焊接质量和效率。以...
【详情】###机器人焊钳工作原理及未来发展基础 机器人焊钳主要基于电阻焊原理工作。在焊接过程中,电...
【详情】