- 品牌
- ABB,西门子,安川,松下,法那科
- 型号
- 全型

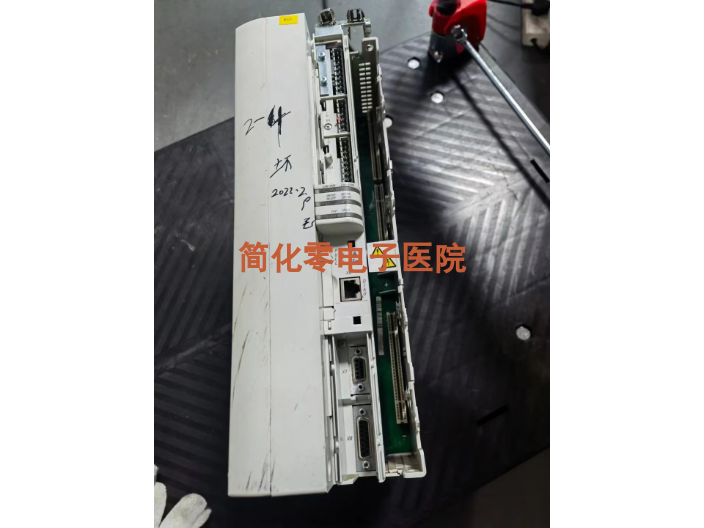
西门子伺服电机无法返回原点的原因实例分析: 西门子伺服电机无法返回原点的故障中与线路的损坏或是输入电源都是有很大的关系,电压过低时不****是会使电机运行出现故障还会影响机器的启动。另外有些时候伺服电机的外部环境会导致机器内部的零件损坏。像我去年8月份时遇到的一个客户当时是去现场维修一台贝加莱的伺服电机,当时那个客户的工厂也是被水浸泡了,这台伺服电机刚好是在一楼老的生产车间,并且工人对机器的保养与运用并没有什么经验,只是将机器内部的水清理干净后便开机使用了。这一开机可好,只听到嘣的一声机器的主板炸毁包括连接主板线路全部损坏还有很多的小零件了报废掉了,可是让在场的工人吓坏了一个小小的失误导致这么大的损失。
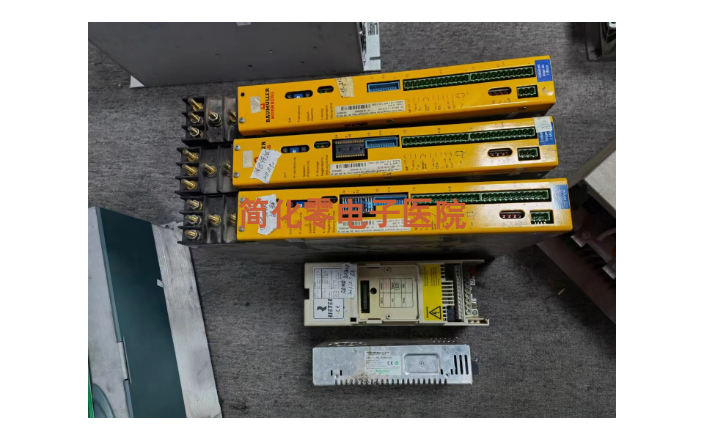
鲍米勒伺服放大器根据输出转矩的有效值计算负载率。当此值超过 Pr5.12 中设定的过载水平(初始设定值 = 115%)时,将发生此保护。 鲍米勒放大器维修 下面是鲍米勒伺服放大器出现过载保护的维修方法 一、电机振动和过载保护发生时 1、降低****和第二速度环增益→有效→机械共振引起的振荡→ 重新调整增益或降低速度环增益。空载时,设定惯量比 → 将惯量比 Pr0.04 重置为初始设定。 2、检查UVW接线错误。(特别是放大器侧) 3、降低第 1 和第 2 位置的环路增益 → 有效 → 位置与速度增益相比过大。 → 减小位置增益或增大速度增益,或增大惯量比。增益切换无效时,只有****个有效,增益切换时,参考参数更改有效。发那科伺服驱动器维修要注意的一些问题.
为了进一步确定故障部位,维修时在系统接通的情况下,利用手轮少量移动Z轴(移动距离应控制在系统设定的比较大允许跟随误差以内,防止出现跟随误差报警),测量Z轴直流驱动器的速度给定电压,经检查发现速度给定有电压输入,其值大小与手轮移动的距离、方向有关。由此可以确认数控装置工作正常,故障是由于伺服驱动器的不良引起的。检查驱动器发现,驱动器本身状态指示灯无报警,基本上可以排除驱动器主回路的故障。考虑到该机床X、Z轴驱动器型号相同,通过逐一交换驱动器的控制板确认故障部位在6RA26**直流驱动器的A2板。根据SIEMENS6RA26**系列直流伺服驱动器的原理图,逐一检查、测量各级信号,然后确认故障原因是由于A2板上的集成电压比较器N7(型号:LM348)不良引起的:更换后,机床恢复正常。OKUMA大隈800卧式加工中心伺服驱动器报警维修.常州发那科伺服驱动器维修技巧
" 施耐德伺服驱动器常见故障分析及维修案例解析".连云港AB 伺服驱动器维修案例
根据这一现象,可以得出X轴驱动器的速度/电流调节器板不良的结论。根据SIEMENS6RA26**系列直流伺服驱动器原理图,测量检查发现,当少量移动X轴时驱动器的速度给定输入端57与69端子间有模拟量输入,测量驱动器检测端B1,速度模拟量电压正确,但速度比例调节器N4(LM301)的6脚输出始终为0V。对照原理图逐一检查速度调节器LM301的反馈电阻R25、R27、R21,偏移调节电阻R10、R12、R13、R15、R14、R12,以及LM301的输入保护二极管V1、V2,给定滤波环节R1、C1、R20、V14,速度反馈滤波环节的R27、R28、R8、R3、C5、R4等外部元器件,确认全部元器件均无故障。因此,确认故障原因是由于LM301集成运放不良引起的;更换LM301后,机床恢复正常工作,故障排除。连云港AB 伺服驱动器维修案例

一旦故障点被明确,维修工作便进入了紧张而细致的修复阶段。在这个过程中,技术人员的专业能力和细致入微的工作态度得到了充分的体现。针对电路板上的微小损伤,他们运用微焊接技术,以毫米级的精细度进行修复,确保每一个焊点都牢固可靠。同时,对于软件层面的故障,他们则通过专业的软件工具进行调试,优化参数设置,使伺服驱动器重新焕发出精细的控制能力。这种修复工作不仅要求技术人员具备高超的技艺,还需要他们具备耐心和毅力,因为每一个细节都可能影响到修复效果。通过数据分析和预测,可以提前发现伺服驱动器的潜在故障风险。苏州大隈伺服驱动器维修方法检查X轴在出现报警的位置及附近,发现它对Y轴测量系统(光栅)并无干涉与影响,...
- 张家港三菱伺服驱动器维修技巧 2024-11-23
- 丹阳FAGOR法格伺服驱动器维修 2024-11-22
- 宁波SEW伺服驱动器维修多少钱 2024-11-22
- 泰州施耐德伺服驱动器维修服务 2024-11-21
- 新疆伦茨 伺服驱动器维修案例 2024-11-21
- 无锡伺服驱动器维修方法 2024-11-21
- 新疆富士伺服驱动器维修服务中心 2024-11-20
- 无锡博士力士乐伺服驱动器维修技巧 2024-11-19
- 泰州松下伺服驱动器维修 2024-11-18
- 苏州施耐德伺服驱动器维修服务 2024-11-17


- 江阴丹佛斯伺服驱动器维修案例 2024-11-16
- 泰州松下伺服驱动器维修方法 2024-11-15
- 马鞍山博士力士乐伺服驱动器维修服务 2024-11-13
- 马鞍山台达伺服驱动器维修 2024-11-12
- 苏州伦茨 伺服驱动器维修服务 2024-11-12
- 常州丹佛斯伺服驱动器维修服务 2024-11-11




- 苏州大隈伺服驱动器维修方法 11-23
- 连云港大隈工控机维修厂家 11-23
- 张家港三菱伺服驱动器维修技巧 11-23
- 无锡汇川PLC维修无法开机 11-23
- 新疆英威腾变频器维修过流故障 11-23
- 无锡邦飞利变频器维修 11-23
- PLC维修案例分享 11-23
- 无锡西门子电源模块维修故障分析 11-23
- 新疆艾默生CT变频器维修炸机 11-22
- 丹阳FAGOR法格伺服驱动器维修 11-22