- 品牌
- 崴而淀
- 型号
- 齐全
- 类型
- 自动焊接设备
接头端头温度也逐渐升高。2s的延迟时间之后,送进油缸以闪光速度后退直到D36=D20完成一个回合的预热闪光,总共完成C5次闪光后,油缸以闪光速度前进到达顶锻位置,之后送进油缸以顶锻速度移动至顶锻完成位置后,计时器计时并完成顶锻保压,顶锻保压是为了密封工件端面间隙和过梁爆破后的火口,挤出间隙中的液态金属和夹杂物,获得牢固的接头。顶锻完成后PLC控制传动机构动作进入下一个工作循环。焊接循环周期流程图。在闪光焊的每一个循环中,送进油缸的位移和送进速度都由液压泵的输出压力和流量决定,油缸的位移决定了圆环连接头的间隙值。另一方面,圆环链接头的间隙大小对焊接电流的稳定起着重要作用。因此,控制系统需要对送进油缸的输出位移进行精确调节以保证焊接过程中的焊接电流稳定。采用基于油缸位移反馈的闭环PID调节实现对焊接电流的精确控制。圆环链焊接系统焊接电流闭环控制原理图,经电流变送器采集到的电流信号经A/D转换后输入PLC,与系统设定的焊接电流比较运算后,将控制信号输出给液压系统,较好的终达到焊接电流稳定的目的。焊接循环周期流程图图4焊接电流闭环控制原理图PID控制器通过比例作用减小瞬时焊接电流的稳定误差。上海崴而淀电器有限责任公司为您提供对焊机,有需要可以联系我司哦!天津工地钢筋对焊机保养

本实用新型涉及焊接技术领域,具体为一种钢带自动对焊机脚踏控制装置。背景技术:现有的对焊机钢带经过剪切处理后,需要通过人工手动对钢带进行定位,定位速度慢,当需要对钢带进行大批量对焊时,会耗费大量的人工,而且效率不高,此外人手动的调整对齐,有时需要将手伸到焊机的工作范围内,存在一定的安全隐患。技术实现要素:本实用新型的目的在于提供一种钢带自动对焊机脚踏控制装置,以解决上述背景技术中提出的问题。为实现上述目的,本实用新型提供如下技术方案:一种钢带自动对焊机脚踏控制装置,包括安装板、脚踏开关以及控制箱,所述安装板的前后边侧固定连接有上下贯穿的立柱,前后两个立柱之间转动连接有较前的辊轮,所述立柱的后侧安装有伺服电机,所述伺服电机的输出端与较前的辊轮的中心轴连接,所述立柱的上侧设有矩形的卡槽,所述卡槽内卡接有滑块,前后两个滑块之间转动连接有第二辊轮,所述立柱的上端用螺栓安装有盖板,所述盖板的下侧连接有弹簧,所述弹簧的下端与滑块连接。推荐的,所述安装板的底部四角焊接有支腿,所述支腿的下端安装有地脚。推荐的,所述脚踏开关与控制箱通过导线电性连接,所述控制箱与伺服电机通过导线电性连接。推荐的。吉林钢筋对焊机哪家质量好上海崴而淀电器有限责任公司为您提供对焊机,期待您的光临!

以限定和调节铜电板的准确位置以及定位焊接时锯条的准确位置;铜电板安装在左电极座上,作为焊接的下电极;静电极头组件通过其下部的钢电极放置在铜电板上,作为焊接的上电极,和铜电板相互配合作为焊接的一对电极使用;静电极头组件又以调整块为导向,在焊台夹紧部件的驱动下,作上下直线往复运动以夹紧或松开锯条;所述活动焊台部件包括右电极座、电极侧限位块、电极前限位块、铜电板、调整块、动电极头组件和弹簧支柱;电极侧限位块和电极前限位块分别安装在右电极座的侧面和前面,以限定和调节铜电板的准确位置以及定位焊接时锯条的准确位置;铜电板安装在右电极座上,作为焊接的下电极;动电极头组件通过下部的钢电极放置在铜电板上,作为焊接的上电极,和铜电板相互配合作为焊接的一对电极使用;动电极头组件又以调整块为导向,在焊台夹紧部件的驱动下,作上下直线往复运动以夹紧或松开锯条;弹簧支柱安装在右电极座的后端,弹簧支柱上连接弹簧的另一端与箱体结合件一侧相连,弹簧收缩时提供活动焊台部件回撤所需的部分力;所述焊台夹紧部件包括螺杆座、螺杆套、夹紧螺杆、手柄座、手柄和手柄球;螺杆套压装在螺杆座上,手柄球通过手柄与手柄座相连。
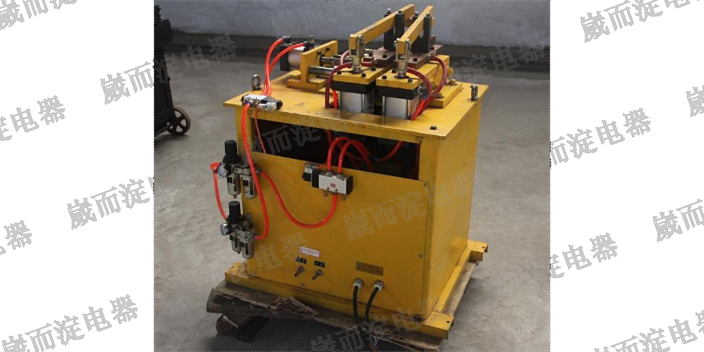
对焊机主要由机架、静夹具、动夹具、杠杆传动顶锻机构、阻焊变压器及电气控制元件等部件组成。1、动、静夹具:主要由手动方牙螺杆加压,使被焊工件紧固于动、静夹具中,其压力大小由焊机备件专门扳手的扳紧程度确定。螺丝导轨3、电气控制:当按动操纵手柄上的按钮开关时,通过继电器使交流接触器吸合,从而接通阻焊变压器的初级电源。焊接时,只须按动按钮,利用杠杆操纵夹具向前。4、阻焊变压器:焊接时,按截面积、焊机气缸容量以及焊接工艺方法等具体情况,选择调节级数,以获得比较好二次电压。变压器级数调整。5、电气原理:焊接过程由焊工通过操纵手柄按钮控制继电器;交流接触器的接通与切断,由继电器控制。上海崴而淀电器有限责任公司是专业的焊接设备生产厂家,专注于研制销售高效节能的电阻焊机、自动化焊接设备及行业性非标专门焊接设备,安嘉专注于如何提高焊接品质、焊接效率和降低焊接成本。对焊机,就选上海崴而淀电器有限责任公司,让您满意,欢迎您的来电!
数据采集方面主要有电流检测、液压压力和温度检测,以及送进油缸的位移检测等。其中较为重要的是电流互感器和磁致伸缩MTS位移传感器,位移传感器的模拟量信号经PLC的CPU运算后输出至电液比例阀以精确控制送进油缸位移,实现焊接电流的稳定和顶锻保压等。闪光对焊机控制系统的继电器、接触器、行程开关、指示灯、模拟量信号数显表、触摸屏等元件集成在一个电气控制柜中。现场数据采集参数分别由4路A/D通道循环检测;CPU226通过RS232通信协议与WEINVIEW触摸屏建立通讯,控制系统硬件结构如图2所示。图2控制系统硬件结构3对焊机控制系统软件及PID控制算法基于西门子PLC200的对焊机控制系统主要完成焊接准备、焊接循环周期、焊接检测记忆故障报警等功能,其中焊接循环周期是保证圆环链顺利完成闪光对焊的关键,也是文中设计的重点。油缸位移传感器检测到的位移值存放在PLC存储器D36中,D49为工件到达刚性接触后的位移值,D20为圆环链接口间隙位移值。在闪光阶段前,送进油缸以普通速度前进,到达刚性接触位置后D36=D39,进入闪光阶段,油缸以闪光速度运动,圆环链接头端部在送进油缸的推动下发生轻微接触,在电流作用下接触点熔化形成液体金属过梁,圆环链接头间隙逐渐减小。上海崴而淀电器有限责任公司对焊机获得众多用户的认可。甘肃自动闪光对焊机厂家
上海崴而淀电器有限责任公司为您提供对焊机,欢迎您的来电哦!天津工地钢筋对焊机保养
上海崴而淀对焊机主要由机架、静夹具、动夹具、杠杆传动顶锻机构、阻焊变压器及电气控制元件等部件组成。1、动、静夹具:主要由手动方牙螺杆加压,使被焊工件紧固于动、静夹具中,其压力大小由焊机备件专门扳手的扳紧程度确定。螺丝导轨3、电气控制:当按动操纵手柄上的按钮开关时,通过继电器使交流接触器吸合,从而接通阻焊变压器的初级电源。焊接时,只须按动按钮,利用杠杆操纵夹具向前。4、阻焊变压器:焊接时,按截面积、焊机气缸容量以及焊接工艺方法等具体情况,选择调节级数,以获得比较好二次电压。变压器级数调整。5、电气原理:焊接过程由焊工通过操纵手柄按钮控制继电器;交流接触器的接通与切断,由继电器控制。上海崴而淀电器有限责任公司是专业的焊接设备生产厂家,专注于研制销售高效节能的电阻焊机、自动化焊接设备及行业性非标专门焊接设备,上海崴而淀专注于如何提高焊接品质、焊接效率和降低焊接成本。天津工地钢筋对焊机保养
上海崴而淀电器有限责任公司是以提供点焊机,凸焊机,碰焊机,排焊机内的多项综合服务,为消费者多方位提供点焊机,凸焊机,碰焊机,排焊机,公司始建于2005-02-04,在全国各个地区建立了良好的商贸渠道和技术协作关系。公司承担并建设完成机械及行业设备多项重点项目,取得了明显的社会和经济效益。产品已销往多个国家和地区,被国内外众多企业和客户所认可。
- 北京薄板对焊机生产厂家 2024-10-21
- 小型对焊机配件 2024-10-21
- 重庆大功率对焊机生产厂家 2024-10-08
- 陕西钢管对焊机售后 2024-10-04
- 重庆大功率对焊机 2024-10-03
- 甘肃链条对焊机保养 2024-10-02
- 上海小型对焊机哪家质量好 2024-10-02
- 河北对焊机价格 2024-10-01
- 天津钢筋对焊机供应商 2024-10-01
- 宁夏钢筋对焊机生产厂家 2024-10-01
- 广西气动对焊机设备生产 2024-10-01
- 气动对焊机配件 2024-10-01

