- 品牌
- HYDRA,上海海塔,海特尔
- 型号
- 齐全
- 产地
- 上海
- 是否定制
- 否
检查超高压软管有无折弯等损伤;连接时先理顺软管不得纠结,插头插座擦干净无污物,将快装接头插到底,确保连接可靠,并用手将螺纹套锁紧,否则快装接头内单向阀未顶开无法正常供油。操作程序:1)线控开关按钮功能:按下(RUN)按钮,油缸推进;松开按钮,油缸自动复位。按下(STOP)按钮,油泵停止。2)液压泵起动前,先打开(旋松)压力调节阀,再打开电源(ON),检查液压泵运转是否正常;然后点动线控按钮数次,运转数分钟,将压力调节到所需预设压力值。额定压力为70Mpa。可根据用户需求实现全自动连续拆卸与锁紧提高常规液压扳手锁紧效率的1/3。上海手动液压扳手

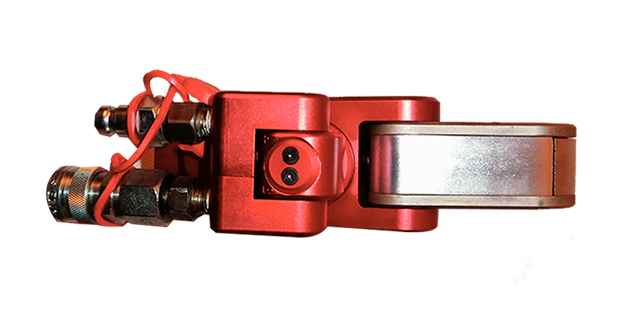
液压扭矩扳手是由本体、电动液压泵、双联高压油管、套筒组成。液压泵启动后通过马达产生压力,将内部的液压油通过油管介质传送到液压扭矩扳手,然后推动液压扭矩扳手的活塞杆,由活塞杆带动扳手前部的棘轮使棘轮能带动驱动轴来完成螺栓的预紧拆松工作。液压扭矩扳手泵可以是电动或者气动两种驱动方式。液压扭矩扳手本体液压扭矩扳手的本体主要由三部分组成,本体(也叫壳体),油缸和传动部件。油缸输出力,油缸活塞杆与传动部分组成运动副,油缸中心到传动部件中心距离是液压扳手放大力臂,油缸出力乘以力臂,就是液压扳手理论输出扭矩德国自动可调液压扳手是什么可一机多用,一个动力头可配备多种工作头使用,工作范围广。

液压扳手一般是由液压扳手本体、液压扳手泵站以及双联高压软管和重型套筒组成。液压扳手泵可以是电动或者气动两种驱动方式。液压扳手基本组成:液压扳手是由本体、电动液压泵、双联高压油管、套筒组成。液压泵启动后通过马达产生压力,将内部的液压油通过油管介质传送到液压扳手,然后推动液压扳手的活塞杆,由活塞杆带动扳手前部的棘轮使棘轮能带动驱动轴来完成螺栓的预紧拆松工作。液压扳手的本体主要由三部分组成,本体(也叫壳体),油缸和传动部件。油缸输出力,油缸活塞杆与传动部分组成运动副,油缸中心到传动部件中心距离是液压扳手放大力臂,油缸出力乘以力臂,就是液压扳手理论输出扭矩。液压扳手同步系统应用:液压扳手同步系统主要目的是为了避免法兰面单边受压模式,这种模式会导致法兰面的垫片因挤压过度而失效,从而引起泄露。同步系统是两台或四台液压扳手同时连接到一台泵上使用。根据液压原理,多部液压扳手同时工作,同时输出设定扭矩,即可实现法兰平行闭合,其扭矩精度达到3%。同步系统可一次将螺栓锁紧,而单系统需多次加载,分步锁紧,由此可见同步系统的效率远大于单系统。液压扳手主要分类及特点:液压扳手有驱动液压扳手和中空液压扳手两大系列。
动力单元液压扳手泵是液压扳手的动力单元.。液压扳手泵属于高压泵,工作压力一般为70MPa,常见的有电动液压泵和气动液压泵。液压扳手泵由马达(电机或气马达)、泵、管路、电气控制等组成;泵常见的有二级泵和三级泵,一般的二级泵是低压齿轮泵和高压柱塞泵。齿轮泵为柱塞泵提供带压液压油,齿轮泵和柱塞泵的换压力为7-10MPa。三级泵的结构多样,典型的采用全部为柱塞泵的结构,低压4根大直径柱塞,中压2根小直径柱塞,高压2根小直径柱塞。也有三级泵采用一级泵为齿轮泵,二级、三级泵为柱塞泵。可按工艺要求任意设定放张量自动完成放张。

2、通过螺母转角控制预紧力根据需要的预紧力计算出螺母转角拧紧时量出螺母转角就可以达到控制预紧力的目的。测量螺母转角**简单的方法是刻一条零线,按鲁母转过几方的数量来测量螺母角,螺母转角的测量精度可控制在10°-15°内。3、通过螺栓伸长量控制预紧力由于螺栓的伸长量只和螺栓的应力有关,可以排除摩擦系数、接触变形、被连接件变形等可变因素的影响。所以,通过通过螺栓伸长量控制预紧力可以获得很高的精度,此种方法被广泛应用于重要场合螺栓连接的预紧力控制。4、通过液压拉伸器控制预紧力使用液压拉伸器给螺栓施加拉紧力,使螺栓伸长,然后旋合螺母,待卸下载荷,由于螺栓收缩就可在连接中产生和拉力相等的预紧力。此种方法可以提高预紧力的控制精度。液压拉伸器给螺栓施加预紧力时没有摩擦力,故该方法适用于任何尺寸的螺栓,而且可以给一组螺栓同时施加预紧力,均匀压紧螺母和垫片,不致出现倾斜而影响预紧力的精确控制。5、利用转角控制预紧力利用拧紧力矩与转角的关系控制预紧力就是给螺栓施以一定的力矩,然后使螺母转过一定的角度,检查**后的力矩与转角是否满足应有关系,以避免预紧不足或预紧过度。可定制各种特殊规格的套筒。为了您能正确选择套筒规格,请与HYDRA工程师联系。德国自动可调液压扳手是什么
可实现2台或4台以上液压扳手同时预紧或拆卸,减小劳动强度,提高劳动效率。上海手动液压扳手
压力控制回路-为了保证液压系统整体的安全,使用响应速度很高的溢流阀。此外为了适应不同系统所要求的力,常用减压阀、顺序阀、平衡阀、压力继电器等,构成一些常用的压力回路。主要由调压回路、减压回路、增压回路、卸荷回路、保压回路、释压回路、平衡回路、缓冲回路、安全回路等组成。方向控制回路-用换向阀改变执行器的运动方向;操纵方式有手动、机械、电磁、液动、电液动等,可根据使用目的选择。主要由进口、出口、旁路节流调速回路,变量泵-定量马达(液压缸)式、定量泵-变量马达式、变量泵-变量马达式容积调速回路等组成。多执行器回路-顺序动作使用顺序阀、行程阀、压力继电器、电气行程开关;同步动作使用节流阀、分流集流阀、电液伺服阀、比例阀。可根据动作顺序转换和同步精度选择。**动作彼此互不影响和干扰使用电液伺服阀、单向阀、蓄能器等。主要由压力控制顺序回路、行程控制顺序回路、时间控制顺序回路、刚性连接同步回路、节流同步回路、分流集流同步回路、机械反馈同步回路、比例放油同步回路、伺服**同步回路、防干扰回路等组成。液压系统辅助回路有以下几种形式:过滤回路-在泵的吸油管处、回油管路、压力油管路中重要元件前设置过滤器。上海手动液压扳手
上海海塔机械制造有限公司是我国液压扳手,千斤顶,拉马,拉伸器专业化较早的有限责任公司之一,公司成立于2005-06-21,旗下HYDRA,上海海塔,海特尔,已经具有一定的业内水平。公司承担并建设完成五金、工具多项重点项目,取得了明显的社会和经济效益。上海海塔机械将以精良的技术、优异的产品性能和完善的售后服务,满足国内外广大客户的需求。
液压扭力扳手榜首:液压扳手在转移和运用的进程中必定要防止摔碰,锤击,这么是很简单使液压扳手损坏的。第二:液压扳手运用的作业液是液压油,所以不能够运用酒精,水等介质作为液压扳手的作业液,当然,有必要是清洗,纯洁的液压油才能够让液压扳手运用。第三:液压扳手是非常喜爱洁净的,特别是进出油口的当地必定不能够有油污泥物。第四:假如知道长时间的不运用液压扳手,必定要给其做好防锈预备,通常大家防锈的办法是将凡士林涂改在液压扳手上,以作防锈处理,然后在放置在本来的箱子中,在枯燥,温度适合的室内进行贮存。第五:为了防止由你污物污染作业油液,所以要将液压体系中衔接油管的接头换成螺纹堵头。第六:高压胶管在长时间的运...
- 海塔液压扳手常见问题 2025-04-27
- 电动液压扳手批量定制 2025-04-27
- 德国液压扳手商家 2025-04-27
- 中空式液压扳手怎么样 2025-04-27
- 德国自动可调液压扳手出厂价 2025-04-27
- 大功率驱动式液压扳手供应商 2025-04-26
- 电动液压扳手性价比 2025-04-26
- 大功率驱动式液压扳手产品介绍 2025-04-26
- 海塔液压扳手性价比 2025-04-26
- 驱动液压扳手批量定制 2025-04-26



- 上海大功率驱动式液压扳手性价比 2025-04-26
- 液压扳手商家 2025-04-26
- 自动可调液压扳手批量定制 2025-04-25
- 上海电动液压扳手批发价 2025-04-25
- 液压扳手品牌 2025-04-25
- 德国全自动液压扳手比较价格 2025-04-25






- HYDRA力矩扳手维修价格 05-02
- 车载式液压拉马批发价 05-02
- 横梁可调液压拉马参考价 05-02
- 上海数显式力矩扳手参考价 05-02
- 德国整体式液压拉马定制价格 05-02
- 上海开口式力矩扳手哪里买 05-02
- 德国弹簧自动回位液压螺栓拉伸器出厂价 05-01
- 自锁式液压拉马哪里买 05-01
- 开口式力矩扳手要多少钱 05-01
- 横梁可调液压拉马售后服务 05-01