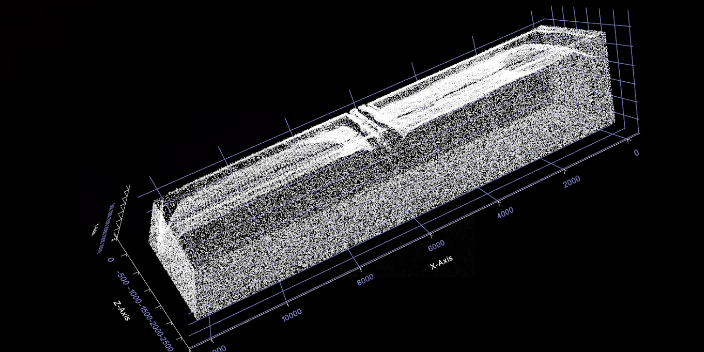
传统的土方测量方法工作量大,不易在计算机上实现,不能有效利用现有的数据。在工程建设过程中土方测量的精度直接关系到工程建设中各方面的经济利益,因此土方测量的准确性十分重要。传统的土方数据采集方式主要是利用RTK技术或全站仪人工采集,随着行业设备的升级迭代,基于激光雷达扫描技术的数据采集模式迅速兴起。激...
激光雷达基本参数
- 品牌
- 慧视科技
- 型号
- 可定制
激光雷达企业商机
激光雷达与微波雷达比较激光雷达的波长比微波短好几个数量级,又有更窄的波束。因此,于微波雷达相比,激光雷达具有如下优点:1、角分辨率高,速度分辨率高和距离分辨率高。采用距离-多普勒成像技术可以得到运动目标的高分辨率的清晰图象。2、抗干扰能力强,隐蔽性好;激光不受无线电波干扰,能穿越等离子鞘,低仰角工作时,对地面多路径效率不敏感。激光束很窄,只有在被照射的那一点,那瞬间,才能被接收,所以激光雷达发射的激光被截获的概率很低。3、激光雷达的波长短,可以在分子量级上对目标探测。这是微波雷达无能为力的。4、在功能相同的情况下,比微波雷达体积小,重量轻。差分激光雷达的测试原理是使用激光雷达发出两种不等的光。云南ip67防水激光雷达扫描仪

激光雷达是工作在光频波段的雷达。与微波雷达的原理相似,它利用光频波段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信号相比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)等信息,实现对目标的探测、跟踪和识别。激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。激光光速发散角小,能量集中,探测灵敏度和分辨率高。多普勒频移大,可以探测从低速到高速的目标。天线和系统的尺寸可以作得很小。利用不同分子对特定波长得激光吸收、散射或荧光特性,可以探测不同的物质成分,这是激光雷达独有的特性。西藏大角度测量激光雷达技术激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。

激光雷达通过光探测距离生成数以千万计的数据点生成点 云,为机器和计算机提供 3D 周围环境的准确展示和感知,让“看见” 和“看清”赋能新一代汽车。 的车载激光雷达需要具备良好的测远能力、精度、高清晰度,高性价比和低功耗。具体来看,假设高速路段行驶速度为 100km/h 约合 28m/s,一般情况下 100km/h 到 0km/h 制动需要 3-4 秒左右,所以 高速刹车制动距离为 100-150m。对于自动驾驶主雷达,为了保证高速 行驶安全,激光雷达探测距离需要在 200-250m 以上较为安全。拥有良 好的测远能力意味着留给系统进行感知和决策的时间越长,安全性更好。 拥有良好的角分辨率使探测器对探测目标物有好清晰度和识别能力。同 时,低功耗在实际应用当中对安全有巨大帮助,更少电能消耗,意味着 获得更多续航里程。
在自动泊车领域的ACC主动巡航技术,就包括雷达传感器、数字信号处理器和控制模块。司机设定预期车速,系统利用低功率雷达或红外线光束得到前车的确切位置,如果发现前车减速或监测到新目标,系统就会发送执行信号给发动机或制动系统来降低车速,使车辆和前车保持一个安全的行驶距离。当前方道路没车时又会加速恢复到设定的车速,雷达系统会自动监测下一个目标。主动巡航控制系统代替司机控制车速,避免了频繁地取消和设定巡航控制,使巡航系统适合于更多的路况,为驾驶者提供了一种更轻松的驾驶方式。利用遥感直接探测油气上方的烃类气体的异常是一种直接而快捷的油气勘探方法。

自动驾驶感知方案分为轻硬件重算法的视觉方案和以激光雷达为主的 多传感器融合方案。当前汽车制造商正在为车配备各种先进的控制和传 感功能,例如碰撞警告、避让系统、盲点监视器、车道保持辅助、车道 偏离警告、自适应巡航控制等等是一些成熟的驾驶辅助案例,使驾驶体 验更安全、更轻松。对于自动驾驶通常有纯视觉和多传感器融合两种路 径:特斯拉坚持纯视觉方案,采用来自多个摄像头的图像通过神经网络 进行分析,利用海量数据来做出关于加速、制动和转向的决定,特点为 轻传感器重算法。其他厂商均采用激光雷达、相机、毫米波雷达多传感器融合方案提升安全性能,特点是重硬件轻软件。激光雷达、毫米波雷 达、超声波传感器和摄像头各有优缺点。高度自动驾驶和完全自动驾驶 的车辆需要多传感器融合,能在各种天气和照明条件下创建精确的车辆 周围环境感知以及长短距离地图。激光雷达利用激光光波来完成任务。云南车载激光雷达数据
对于成像激光雷达来说,系统还需要解决图像行的非线性扫描修正、幅度/距离图像显示等技术。云南ip67防水激光雷达扫描仪
经过处理便可得到具有坐标信息的影像数据。利用激光进行三维建筑建模的技术。首先,进行数据预处理。就是结合IMUU记录的姿势参数、机载GPS数据、地面基站GPS观察数据、GPS偏心分量、扫描仪和数码相机各自的偏心分量,进行GPS/IMU联合解算,得到扫描仪及相机曝光坐标下的轨迹文件,进而得到外方为元素。其次,使用LIDAR数据商业处理软件将地面数据与非地面数据分离,生成DEM,在利用纯地表数据对影像外方位元素通过寻找同名像点的方式进行校正快速生成DOM。云南ip67防水激光雷达扫描仪
成都慧视光电技术有限公司正式组建于2019-08-26,将通过提供以电子元器件,光电子器件,通讯设备,仪器仪表等服务于于一体的组合服务。慧视光电经营业绩遍布国内诸多地区地区,业务布局涵盖电子元器件,光电子器件,通讯设备,仪器仪表等板块。同时,企业针对用户,在电子元器件,光电子器件,通讯设备,仪器仪表等几大领域,提供更多、更丰富的通信产品产品,进一步为全国更多单位和企业提供更具针对性的通信产品服务。值得一提的是,慧视光电致力于为用户带去更为定向、专业的通信产品一体化解决方案,在有效降低用户成本的同时,更能凭借科学的技术让用户极大限度地挖掘慧视科技的应用潜能。
与激光雷达相关的文章

重庆64线激光雷达批发
- 三维激光雷达的应用 2024-04-19
- 成都毫米波激光激光雷达公司 2024-04-19
- 成都905nm激光雷达厂家批发 2024-04-19
- 四川车用激光雷达结构 2024-04-19
- 成都tof激光雷达市场 2024-04-19
- 西藏16线激光雷达商家 2024-04-19
- 云南无人机激光雷达价格 2024-04-19
- 昆明三位测绘激光雷达测绘 2024-04-18
- 250m激光雷达传感器 2024-04-18
- 云南面阵激光雷达测距 2024-04-18
- 机载激光雷达企业 2024-04-18
- 车载激光雷达批发 2024-04-18
与激光雷达相关的产品




与激光雷达相关的新闻
-
自动驾驶激光雷达成像 2024-04-17 21:02:23实现“看的远、看的细,测的快、测的准”的风场观测是对测风激光雷达的重要挑战。为了获取3米和0.1秒时空分辨率的风场,需再提高现有激光雷达信号检测灵敏度2个数量级以上。团队通过在激光光源、光学收发系统、高速数据采集电路和数据处理算法上对激光雷达进行了优化,并在时频分析、脉冲编码基础上提出一种新的反演算...
-
贵州tof激光雷达应用 2024-04-17 22:02:14随着自动驾驶汽车研发的不断深入,自动驾驶的等级也在不断提升,在自动驾驶L2向L3甚至L4的转变当中,对自动驾驶感知系统和车载传感器的要求也越来越高。在L3级别自动驾驶中的关键硬件中,激光雷达被众多车企视为现阶段实现自动驾驶的比较高阶硬件。同摄像头、毫米波雷达、红外热成像一样,激光雷达也属于汽车感知周...
-
贵阳agv激光雷达应用 2024-04-17 12:02:24慧视光电研发的激光雷达是一种高精度的距离、速度等物理量探测设备,其内部16组激光能够进行360°旋转,形成3D点云图,可以远距离高速实现三维环境扫描和目标探测等任务。在夏季预防自然灾害中,激光雷达具有广泛的应用,可用于水文监测、森林火灾监测、地质灾害监测、气象监测等多个方面,有助于提前预警和减轻自然...
-
云南汽车激光雷达标定 2024-04-17 18:02:21在智慧停车领域,激光雷达能够辅助进行停车,检测车辆移动状态,控制车辆与物体之间的距离。在建模领域,激光雷达能够通过扫描获取物体的3D点云模型,例如城市建模,激光雷达系统能够提供高密度、高精度的三维数据,建筑物的三维重建比用传统方式更容易,也比手工处理更快,不要立体测量的方式获取高程信息。再例如森林检...
与激光雷达相关的问题
新闻资讯
产品推荐
-
稳定目标检测进货价
2026-05-09 -
靠谱的图像处理板大概价格
2026-05-09 -

山东目标检测跟踪
2026-05-09 -

海南目标跟踪厂家电话
2026-05-09 -
安徽图像处理板零售价格
2026-05-09 -

青海光纤数据目标跟踪
2026-05-09 -
智能化目标跟踪性价比
2026-05-09 -

湖北目标跟踪设备
2026-05-09 -

智能化目标跟踪生产企业
2026-05-09